复杂坡面拟合的异源点云配准及 三维地形精细重建

打开文本图片集
Registration of heterogeneous point cloud and precise reconstruction of 3D terrain via complex slope surface fitting
TANG Yiliang1, YANG Yun 1,2* ,WAN Yu1,XU Yongjie¹,WANG Rui1,GU Dizheng1 (1. College of Geological Engineering and Geomatics, Chang'an University, Xi'an 71OO54,China; 2. Cooperation Department of Changan University, State Key Laboratory of Geographic Information Engineering,Xian7lOo54,China) * Corresponding author,E-mail: yangyunbox@chd. edu. cn
Abstract:Addressing the issues of significant density variations,uneven spatial distribution,and indistinct features in UAV image point cloud and 3D laser point cloud within vegetation-covered and multislope regions,this study introduced a novel algorithm that combined sampling consistency initial alignment (SAC-IA) and iterative closest point (ICP) methods to enhance key slope features in point cloud data. Initially,preprocessing was performed on both source point cloud datasets, followed by the application of the random sample consensus (RANSAC) algorithm to fit the post-preprocessing point cloud regions with weak features,thereby enhancing the surface features and establishing multiple key slopes. Subsequently, the SAC-IA and ICP algorithms were integrated to register the two-source point cloud,subsequently eliminating redundancies and overlapping points to achieve fusion. Ultimately,the asymptotic encrypted irregular triangulation network (PTIN) filtering algorithm was employed to extract ground points from the fused point cloud,while the inverse distance weighting(IDW) algorithm was utilized for 3D terrain reconstruction,resulting in the generation of a digital elevation model (DEM). Validation using actual measurement data demonstrates that,compared to the traditional SAC-IA and ICP combined algorithm,the point cloud data accuracy represented by root mean square error value after registration of the algorithm in this paper is reduced by 3.325m ; The DEM point accuracy (represented by mean absolute error and root mean square error)reconstructed from the fused point cloud data decreased by 0.18m and 0.14m respectively. The DEM generated by this study's algorithm meets the national specification requirements for a 1:5OO scale, and it more accurately reflects topographic details.
Key words: Random Sample Consensus(RANSAC); slope fiting; point cloud registration; Digital Elevation Model(DEM);3D reconstruction
1引言
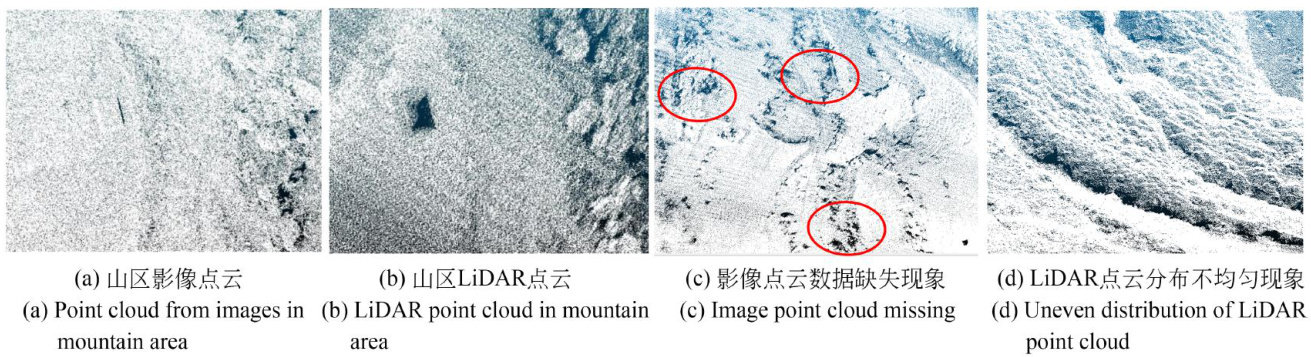
无人机(UnmannedAerialVehicle,UAV)摄影测量技术与无人机激光探测及测距(LightDetectionandRanging,LiDAR)技术是1:5oO大比例尺地形图测绘的常用技术[1],但对于地形复杂多变的山区,单一视角摄影测量技术生成的点云数据会存在缺失现象,导致DEM重建质量不高[2,而利用无人机LiDAR技术进行三维空间数据采集也会存在点云数据缺失或者点云特征不明显的问题[3]。(剩余13474字)
