多属性栅格环境下基于改进蚁群算法的机器人节能路径规划

打开文本图片集
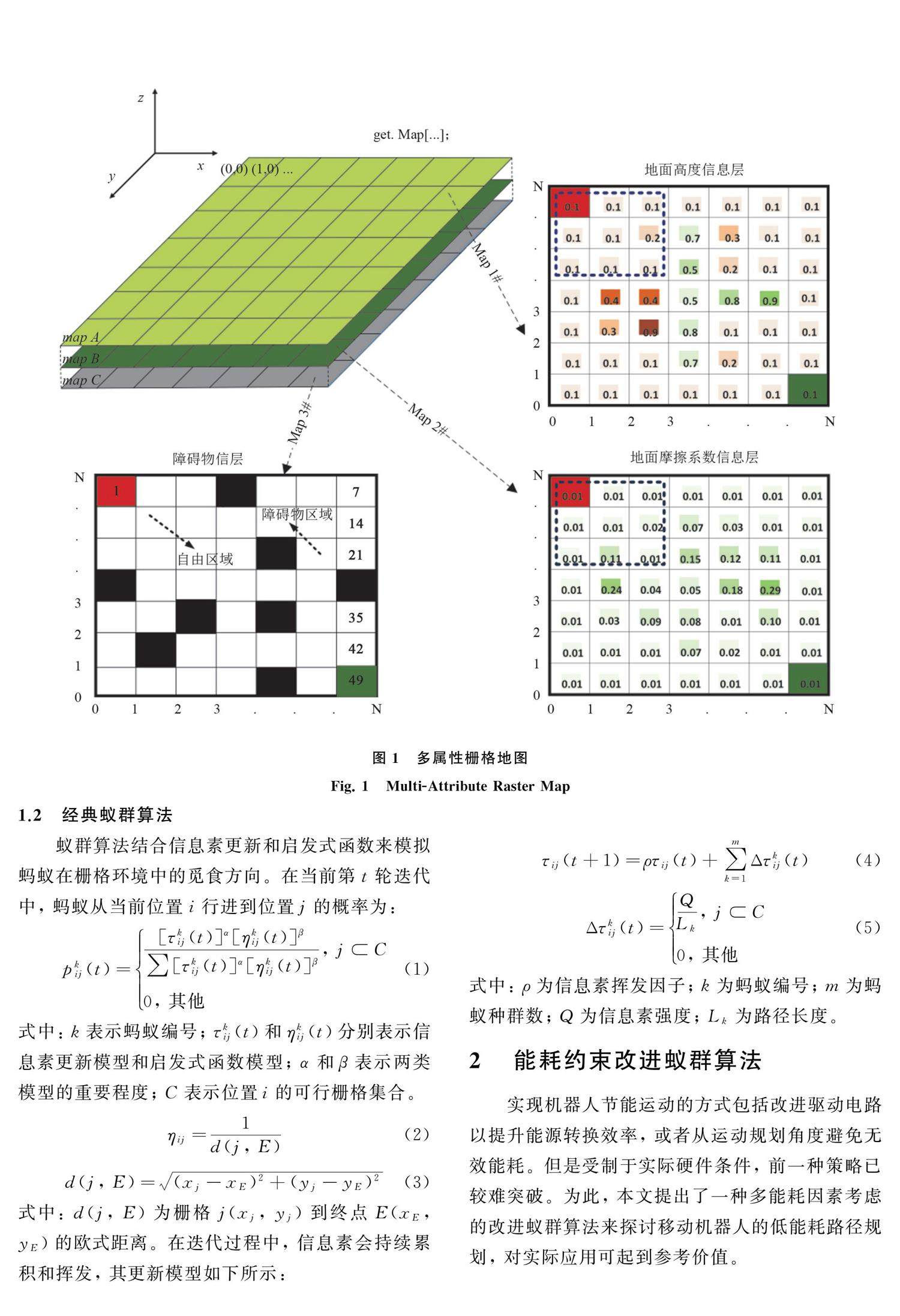
摘要: 针对移动机器人在非结构化环境且有限能源下的任务执行效率问题, 改进蚁群算法实现了节能路径规划。首先, 在常规全局障碍物基础上考虑粗糙地形和非平坦地形因素, 提出了一种多属性栅格地图建模方法; 其次, 为了减少机器人在非结构化环境中的全局路径规划成本, 结合了路径长度、 转向频率、 地形高度以及地面粗糙度等与能耗相关的指标以优化传统蚁群算法的启发式函数; 此外, 考虑了机器人上坡时的势能需求、 下坡过程中动能的回收、 空气阻力与滚动摩擦力和能量转换效率等因素进一步优化了信息素的更新机制。(剩余13225字)
