一种矿用管道检测机器人设计及牵引性能分析

打开文本图片集
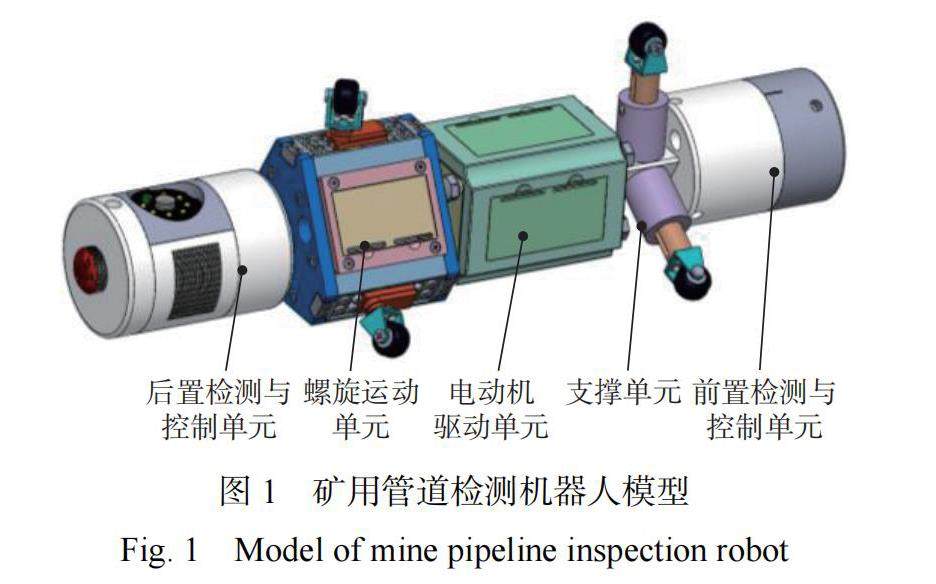
摘要:针对瓦斯抽采管道破损泄漏检测问题,设计了一种具有管道检测和运动控制功能的螺旋式矿用管道检测机器人,介绍了该机器人的结构和检测与控制系统方案。建立了机器人在管道中运行的力学分析模型,并通过动力学仿真研究了影响机器人牵引性能的因素,结果表明:机器人在管道内运行时的牵引力与管道材质、螺旋角、管壁与驱动轮之间法向力有关;机器人在不同材质的管道中运行时最佳螺旋角不同,在相同材质的管道中运行时,无介质运输情况下牵引力高于有介质运输情况;机器人牵引力随法向力的增大而增大,但最佳螺旋角无明显变化;随着螺旋角增大,牵引力先增大后减小,螺旋角为40°时牵引力最大。(剩余13935字)
