基于模糊控制的车道偏离预警模型研究

打开文本图片集
主题词:车道偏离预警 模糊控制 驾驶风格 能见度中图分类号:U471.1 文献标志码:A DOI:10.19620/j.cnki.1000-3703.20240705
Research on AdaptiveLaneDeparture WarningModel Based on Fuzzy Control
Zhang Yi',Yin Chenglong',Zou Xiaomao’,TangYouming²,WangPingl (1.MechanicalandAutomotiveEnginering College,Xiamen TechnologyUniversity,Xiamen 361024;2.Schoolof Mechanical and Energy Engineering,Zhejiang University of Science and Technology,Hangzhou 310023)
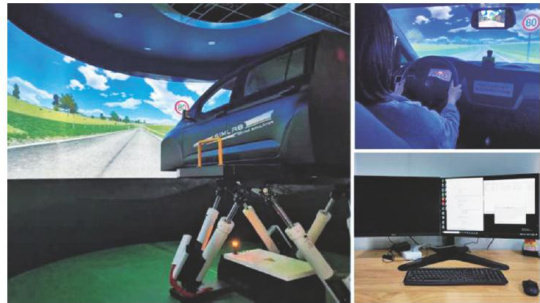
【Abstract】To balance lane departure issues under various driving styles and visibilityconditions,this paper proposes an adaptivelane departure warning strategy.Driving behaviordata is colectedusing driving simulator,and parameters such as lateral positiondeviation,time-to-lanecrossing,anddeviationspeedareseleted.Basedonthefuzzyclusteringalgorithm, driversareclasifiedaccording totheirdrivingstyles.Subsequently,aRadialBasis Function NeuralNetwork(RBFN)model isintroduced toachievedrivingstylerecognition.Diferent warning thresholdsare designed toconstructanadaptivelane departurewarningmodel.Finaly,adriver-in-the-loopexperimentisconducted.Theresultsindicatethatthemodelachieves an overall accuracy of 94.7% ,it caneffectively output dynamic thresholds fordifferent driversand visibility,therebyreducing false alarms and enhancing the applicability of the lane departure warning system.
Keywords:Lane departure warning,Fuzzy control,Driving style,Visibility
【引用格式】张义,尹成龙,邹小毛,等.基于模糊控制的车道偏离预警模型研究[J].汽车技术,2025(7):49-56. ZHANG Y,YINCL,ZOUX M,et al.Research on Adaptive Lane Departure Warning Model Based onFuzzy Control[J]. Automobile Technology,2025(7): 49-56.
1前言
研究显示,车辆行驶的安全性受人、车、环境等因素的综合影响, 93.12% 的道路交通事故由驾驶员操作不规范导致汽车偏离车道引起,而大雾、雨雪等不良天气加剧了高速公路事故严重性1。(剩余11024字)
