基于优化人工势场法的智能车辆编队避障策略研究

打开文本图片集
主题词:智能车辆 编队控制人工势场 莱维飞行队形异构变换中图分类号:U461 文献标志码:A DOI: 10.19620/j.cnki.1000-3703.20250059
Research on the Obstacle Avoidance Strategy of Connected Vehicle Formation Basing on the Optimized Artificial Potential Field Method
Sun Yu1,2 ,CaoManman³,WangQiang?,SunBohua4
Zhejiang University,Hangzhou 3100o;2.Chery New Energy AutomotiveCo.,Ltd.,Wuhu 241002;3.CATARC
IntellgentandConnectedTechnologyCo.,Ltd.,Tianjin3Oo38O;4.NationalKeyLaboratoryofAutomotiveChassis Integration and Bionics,Jilin University,Changchun 130025)
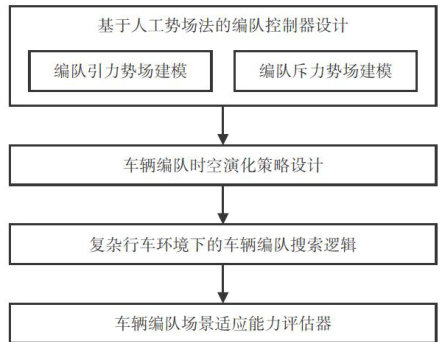
【Abstract】Inorder toovercome thecollsionandstabilityissesof theconnectedvehicle formationin dynamic, uncertainandcomplexdriving scenarios,and improvethedrivingsafetyfortheconectedvehicles,anobstacleavoidance strategyfortheconnectedvehicleformationisproposedbasingonoptimizedartificialpotentialfieldmethod.Theobstacle avoidancestrategyframeworkfortheconnectedvehicleformationisdesignedandthevehicleformationcontrolerbasingonthe classicalartificialpotentialfieldmethodisestablished.Onthisbasis,thevehicleformationsearchlogicwithLevi’sflight randomsearchcharacteristicsisproposedtoovercometheparameterlmitationof theincrementalcoeffcientoftractionand repulsioninartificialpotentialfieldmethod,andenhancetheadaptabilityofthevehicleformationtocomplexdriving environment.Theproposedobstacleavoidancestrategyisverifiedbyaco-simulation testing platform.Resultsshowthatthe connectedvehicle formation basingontheoptimizedartificialpotential fieldmethodcanadapttothecomplex driving environment more quickly,and has a shorter vehicle formation obstacle avoidance time.
Key words:Connected Vehicles,Formation Control,Artificial Potential Field,Levy Flight HeterogeneousFormation Transformation
【引用格式】孙羽,曹曼曼,王强,等.基于优化人工势场法的智能车辆编队避障策略研究[J].汽车技术,2025(7):31-39. SUNY,CAOMM,WANGQ,et al.ResearchontheObstacle Avoidance Strategyof Connected Vehicle Formation Basing ontheOptimizedArtificialPotentialField Method[J].Automobile Technology,2025(7):31-39.
1前言
一,可以提高车辆集群行驶模式的能源利用效率和车辆燃油经济性,减少对环境的污染1。(剩余12877字)
