转向避撞工况下智能车辆的实时决策规划

打开文本图片集
主题词:智能驾驶 图搜索 路径规划 转向避撞中图分类号:U461.91 文献标志码:A DOI:10.19620/j.cnki.1000-3703.20240160
Real-Time Decision and Planning Algorithm for Intelligent Vehicles under Steering Collision Avoidance
Wen Gaobo,Wu Guangqiang (Tongji University,Shanghai 201800)
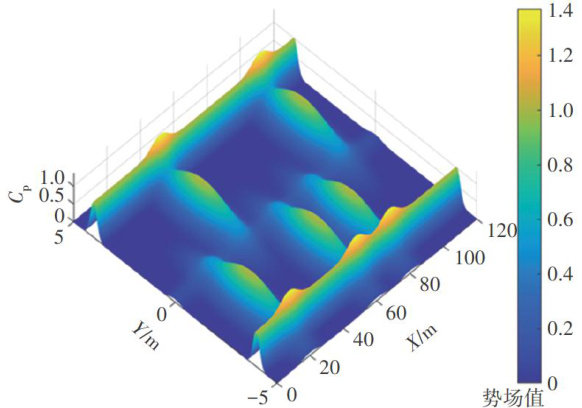
【Abstract】Inviewof the difficultyindesigning multi-objective planning algorithms during emergencysteering for collisionavoidanceandthecomplexityandvariabilityof thenumberandlocationofobstacles,ahierarchicaldecision-making planning algorithmcombining samplingandoptimization isproposed.Considering environmental and kinematicconstraints under structured roads,a variant of the A* algorithm is used to establish the surrounding environmental potential field and compute the kinematiccostusingafifth-degree polynomial.Travellanesare establishedbasedonthecoarsetrajectories,and thequadratic planning problem is solved usingthe segmentation-plus-acceleration method toobtain smooth paths soas to ensurecomfortablepath planning,whileguidingthevehicleback tothecenteroftheroad.Theresultsofsimulationtestsand realvehicletestsshow thatthe proposed schemecan flexiblycomplete thedecision planning tasksacording todifferent obstacles and achieve emergency collsion avoidance.
KeyWords: Intelligent driving,Graph search,Path planning,Steering collision avoidance
【引用格式】温高博,吴光强.转向避撞工况下智能车辆的实时决策规划[J].汽车技术,2025(7):13-22. WENGB,WUGQ.Real-TimeDecisionandPlanningAlgorithmforInteligent VehiclesunderSteeringCollsion Avoidance[J].Automobile Technology,2025(7): 13-22.
1前言
转向避撞工况复杂多变,涉及障碍物、道路等多重因素,且对车辆实时决策规划要求极高。(剩余11896字)
