注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
doi:10.3969/j.issn.2097-3853.2024.03.008
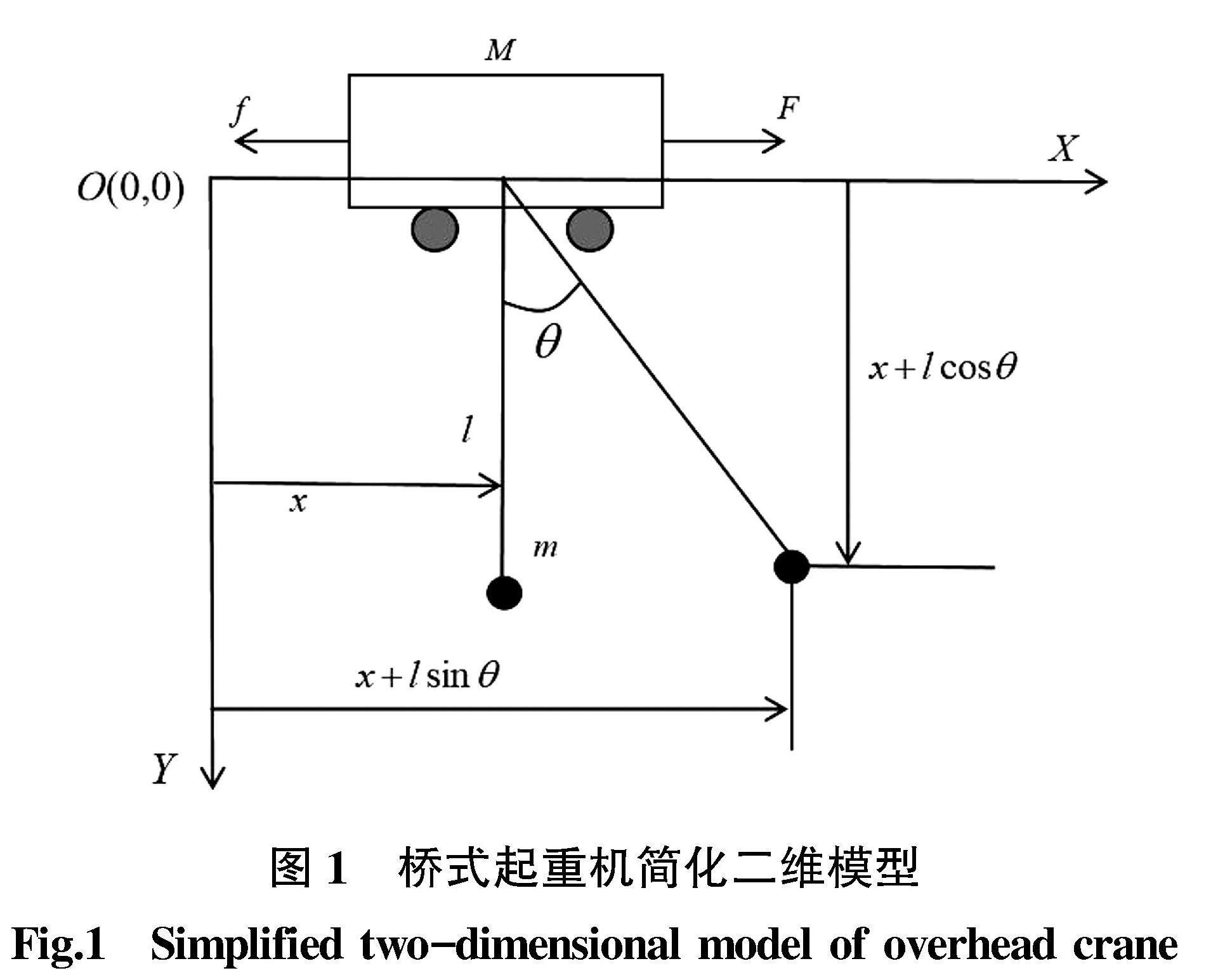
摘要: 针对起重机在吊装作业时产生的负载摇摆以及行车定位的问题,提出了一种改进双闭环模糊PID控制算法,利用拉格朗日方程建立工业起重机防摇摆及行车定位控制系统数学模型。将该算法运用在建立的模型中,并在Simulink仿真平台上分别设计了PID控制系统、模糊PID控制系统和改进双闭环模糊PID控制系统进行对比实验。(剩余10706字)
登录龙源期刊网
购买文章
基于改进双闭环模糊PID控制算法的桥式起重机控制系统
文章价格:6.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00