非结构化环境下的机械臂抓取位姿检测系统研究

打开文本图片集
引用格式:,,.非结构化环境下的机械臂抓取位姿检测系统研究[J].现代电子技术,2026,49(6):133-138.
关键词:机械臂抓取;位姿检测;GraspNet;SAM;非结构化环境;Sawyer机械臂中图分类号:TN911.7-34;TP242 文献标识码:A 文章编号:1004-373X(2026)06-0133-06
Research on robotic arm grasp pose detection system in unstructured environment
SUNShijie1,KANGGaoqiang²,PANWenbo² (1.ScholofTransportationandElectricalEngineering,HunanUniversityof Technology,Zhuzhou412oo7,China; 2.CRRC Zhuzhou Electric LocomotiveResearch InstituteCo.,Ltd.,Zhuzhou 4120O1,China)
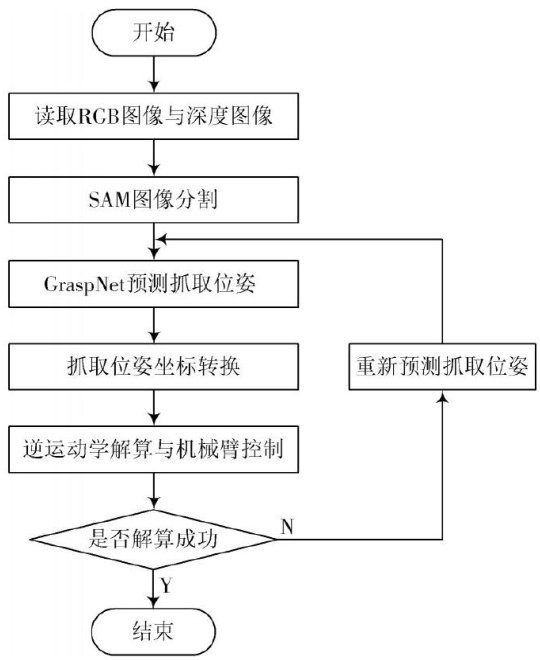
Abstract:In order to enhance theaccuracyandrobustness of robotic grasp pose detection in unstructured environments,a method of grasping pose detection integrating segment anything model (SAM) image segmentation with theGraspNet network is proposed.SAMmodelisusedtosegmenttargetmaskstofilterouttheinterferencefromnon-targetareas,andcombinedwiththe GraspNetnetwork topredict thegraspingpose.The high-robustnessschemeisscreenedbasedon forceclosure theory.The calibratedRealSensecamera isusedtoobtaintheRGB-Ddataandintrinsicparameters,soastoestablishcoordinate transformationrelationshipbetweethecameraandrobotbaseframes.Theroboticarmiscontrolledbymeansofcoordinate transformationand inversekinematicsforthegrasping.The Sawyer7-axicroboticarmand D435icameraareused toestablish theverificationplatformfortheexperiments.Theresultsshowthatthetargetdetectionrateandaveragegraspsuccessrateofthe improvedalgorithmcanreach91.7%and81.6%,respetively,whichare7.5%and8.3%higherthanthoseoftheoriginal GraspNetalgorithmandcansignificantlyreducetheincorrectposescaused byinterferencefromnon-targetobjects.Theproposed methodcanimprove thegraspingaccuracyandgeneralizationabilityinunstructuredenvironmentsbymeansofthecolaborative optimizationofGraspNetandzro-shotsegmentation,providingafeasibletechnical solutionforindustrialautomationandobot grasping tasks.
Keywords:robot arm grasping; pose detection; GraspNet; SAM;unstructured environment; Sawyer robotic arm
0 引言
机械臂自标抓取作为工业自动化与智能机器人领域的核心任务,其精度与鲁棒性直接影响生产效率与系统可靠性[1-2。(剩余9237字)