基于AR 的机器人远程手势遥操作系统开发

打开文本图片集
关键词: 增强现实; 遥操作; 远程可视化; 手势识别; 实景捕捉; 沉浸式人机交互中图分类号:TN911.73⁃34;TP242.2 文献标识码: A 文章编号:1004⁃373X(2025)12⁃0148⁃09
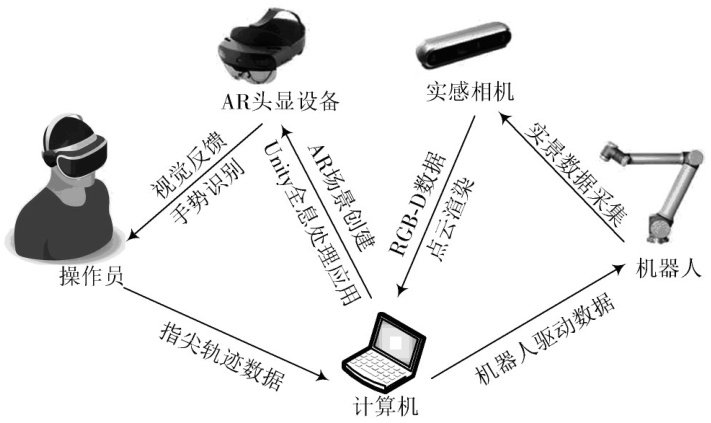
Abstract: Augmented reality (AR) technology provides users with immersive perception and virtual ⁃ real interaction interfaces, showing significant advantages in the field of remote teleoperation and teaching of industry robots. In allusion to the problems of poor interaction and low programming efficiency of robots in complex working environments, a robot remote gesture teleoperation system driven by AI is designed based on Unity3D development environment. The real scene data is collected based on depth camera, and a three ⁃ dimensional immersive virtual robot operating environment is built by means of the HoloLens2 AR headset, allowing operators to obtain on⁃the⁃spot perception without entering high⁃risk physical environments. The gesture recognition algorithm is used to obtain fingertip actions in real ⁃ time, and these actions are used to control the robot's operation in real⁃time. The robot's operations are fed back into the virtual environment in real⁃time, allowing operators to flexibly and dynamically adjust the robot's movements. Taking the spray painting of wind turbine blades as an example, the proposed system can efficiently complete the teleoperation spray painting tasks.
Keywords:augmented reality; teleoperation; remote visualisation; gesture recognition; realistic capture; immersive human ⁃ computer interaction
0 引 言
在“中国制造2025”和“工业4.0”战略背景下,中国制造业向高端领域发展,通过数字化、网络化和智能化的技术创新,及物联网、大数据、人工智能等技术的融合应用,推进工业生产方式革命性转型[1]。(剩余11250字)
