基于转鼓/制动试验平台的自动驾驶整车在环虚拟仿真测试系统设计

打开文本图片集
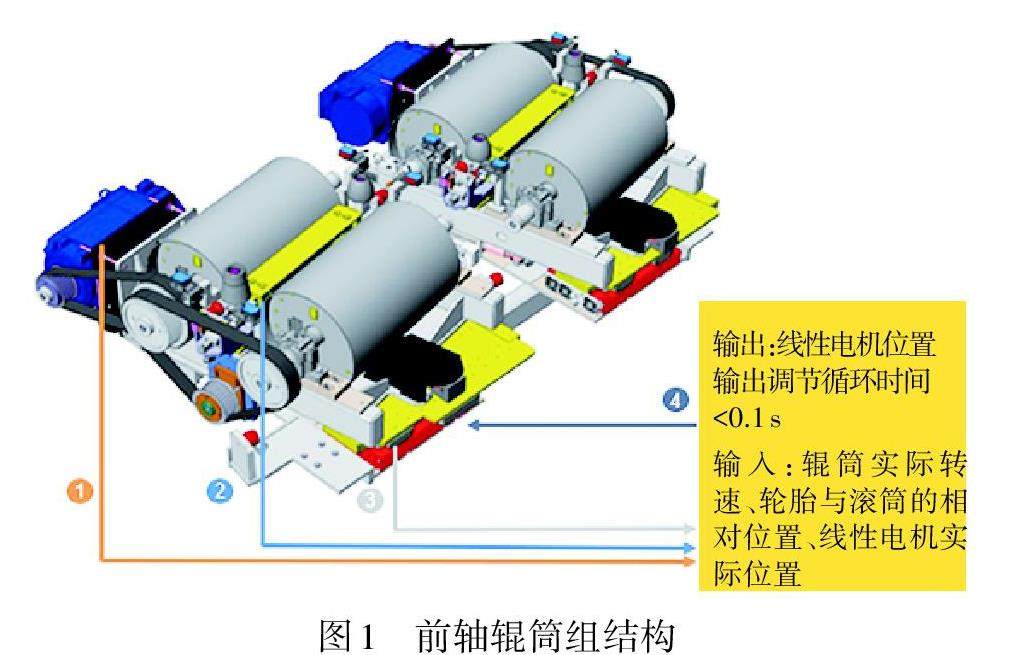
【摘要】为实现转向条件下自动驾驶车辆的功能测试,设计了一种整车在环虚拟仿真测试系统,在传统转鼓/制动试验台的前轴辊筒组上增加由线性电机驱动的旋转板实现整车行驶中最大10°的转向功能,并结合软件仿真技术,针对自动驾驶车辆转向行驶时车速从80 km/h下降到20 km/h的工况进行动态制动力测试,以及车速下降到0 km/h过程的制动摩擦力测试,最后,对测试数据进行了分析验证,结果表明,该测试系统能够在±10°的转向角范围内实现自动驾驶车辆的预期制动加速度变化,并控制测试制动力精度在±5 N的范围内,进一步验证了该测试系统的有效性。(剩余9490字)
