基于参数整定的系留式无人机自抗扰控制器设计

打开文本图片集
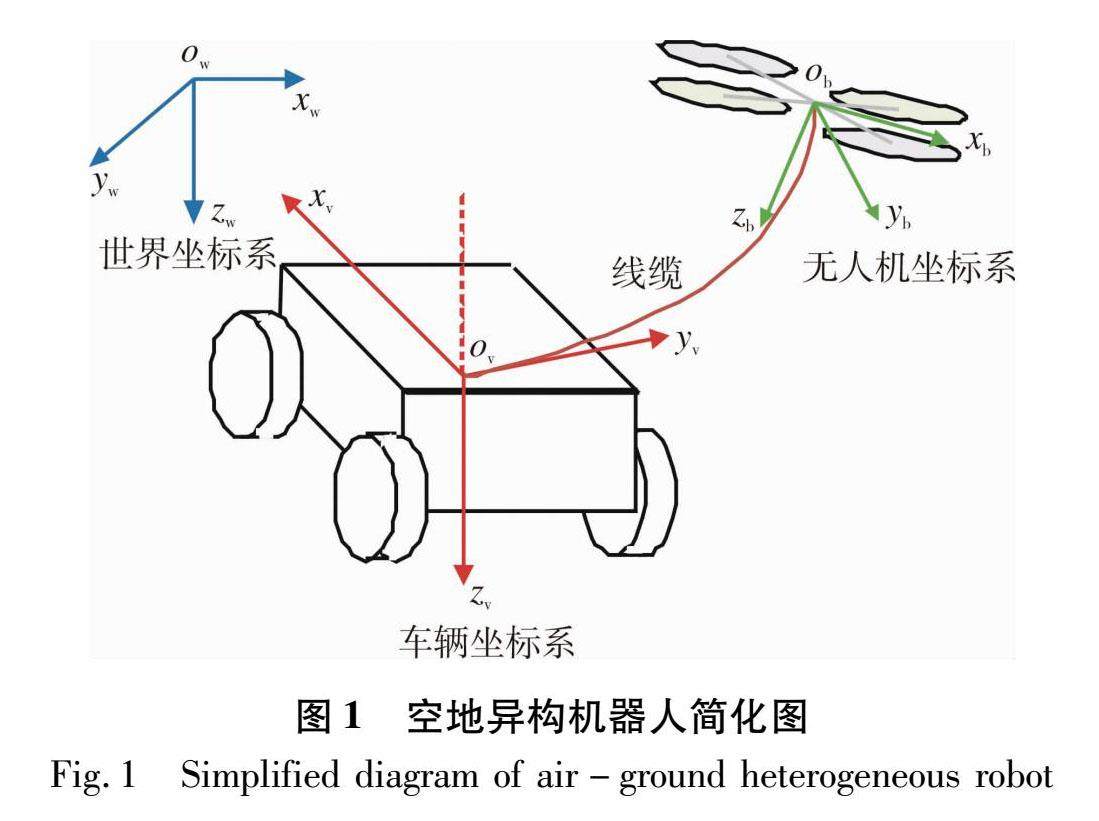
摘要:针对空地异构机器人中系留式无人机遭受线缆干扰的情况,设计了一种基于粒子群优化算法的参数自适应整定方法的自抗扰控制器。建立了系留式无人机的运动学和动力学模型,并针对线缆干扰设计了自抗扰姿态控制器;利用时间绝对误差积分性能指标作为粒子群算法的优化目标和适应度函数,经过粒子群算法的优化得到参数值,并将其应用于姿态控制器;与传统PID姿态控制器和基于非线性扰动观测器的PID姿态控制器以及手动调参的自抗扰控制器进行了控制效果对比。(剩余15502字)
