基于特征深层融合的吊装过程视频目标分割

打开文本图片集
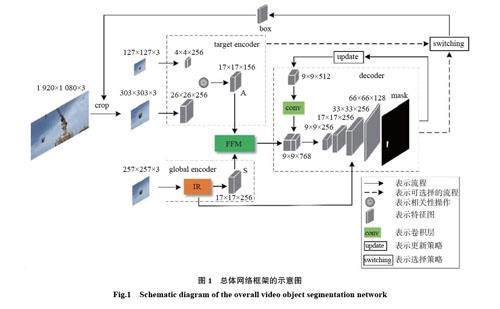
摘要:吊装事故的频繁发生, 对国家、社会、人民都造成了非常大的损害。根据吊装过程的视频信息,实现无人安全监控的关键是准确度和速度,提出了一种新的基于全局编码和非对称卷积的目标分割网络,研究视频图像的半监督目标分割问题。首先,将带有标签的视频图像输入网络,分别通过全局编码器与相似性编码器提取到互为补充的特征,从而获得对目标外观的有效表示;然后,通过非对称卷积将两个分支的特征进行深层融合;最后,采用残差上采样解码生成预测掩膜,实现对目标的分割。(剩余7576字)