五自由度磁悬浮系统的被动轴向力建模与验证

打开文本图片集
DOI:10. 15938/j. emc.2025.05.006
中图分类号:TM301 文献标志码:A 文章编号:1007-449X(2025)05-0053-11
Axial force modeling and verification of five degree of freedom magnetic levitation system
YU Qiang, CAO Xin, DENG Zhiquan (Collge of Automation Engineering,Nanjing Universityof Aeronautics and Astronautics,Nanjing 21106,China)
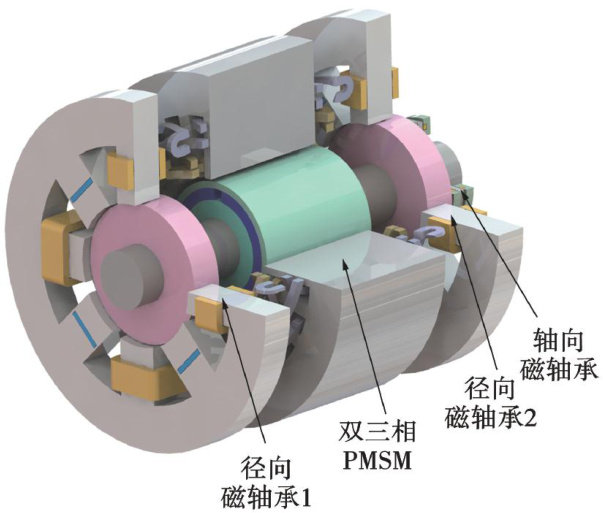
Abstract:In order to study the influence of passve axial force generated by rotor axial movement on magnetic levitation systems,the passive axial force analytical models of permanent magnet synchronous motor (PMSM) and radial magnetic bearings with virtual work method were proposed. Firstly,the air-gap magnetic permeability model was derived when the axial displacement occurs between stator and rotor. Secondly,the air-gap magnetic field energy of PMSM and radial magnetic bearings were obtained. Finally, the analytical models for passive axial force were obtained by the diferential between the air-gap magnetic field energy and axial displacement. Meanwhile,rotor axial movement can result in the reduction of overlapping area between stator and rotor,and then the torque and radial forces of system can be reduced. Therefore,in order to study the influence ofrotor axial movement on torque and radial forces,the analytical models of torque and radial forces during rotor axial movement were established. The simulation and experimental results show that the errors of the established passive axial force models are both less than 5% ,and the errors of established torque and radial force models are less than 2% and 4% ,respectively.
Keywords:five degree of freedom magnetic levitation system; permanent magnet synchronous motor;; ra-dial magnetic bearing;passve axial force; mathematical model; virtual work method
0引言
随着现代电机向高速以及大功率的方向发展,传统机械轴承带来的摩擦和润滑问题将成为高速电驱系统的寿命和运维短板。(剩余14024字)
