基于点线特征的视觉惯性SLAM算法研究

打开文本图片集
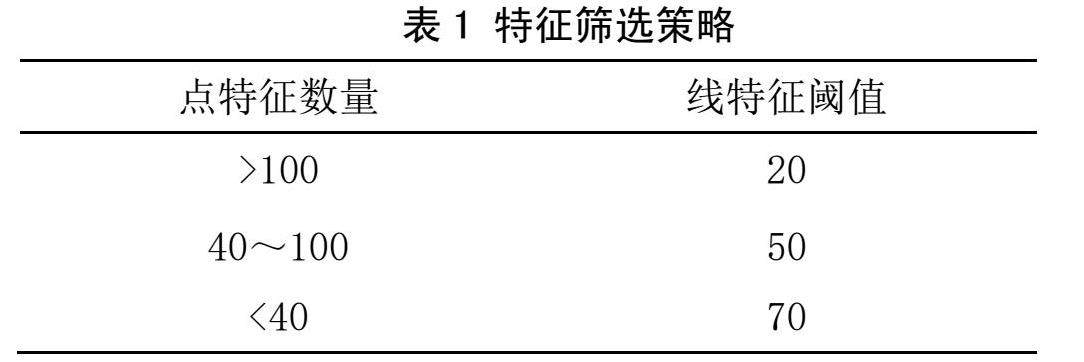
摘要:针对目前单目视觉SLAM易受光照、环境、纹理影响等问题,文章提出一种基于点线特征的单目视觉惯性SLAM(Simultaneous Localization and Mapping)方法。首先,在视觉惯性系统VINS-Mono的基础上,提取EDLines线特征,并采用LBD描述子匹配线特征;其次,在线特征拟合阶段,采用RANSAC方法剔除外点,提高拟合精度;最后,根据所提取的点线特征数量,提出特征筛选策略,保证系统的实时性和定位精度。(剩余7027字)
