基于多传感器融合的室内自主飞行器系统

打开文本图片集
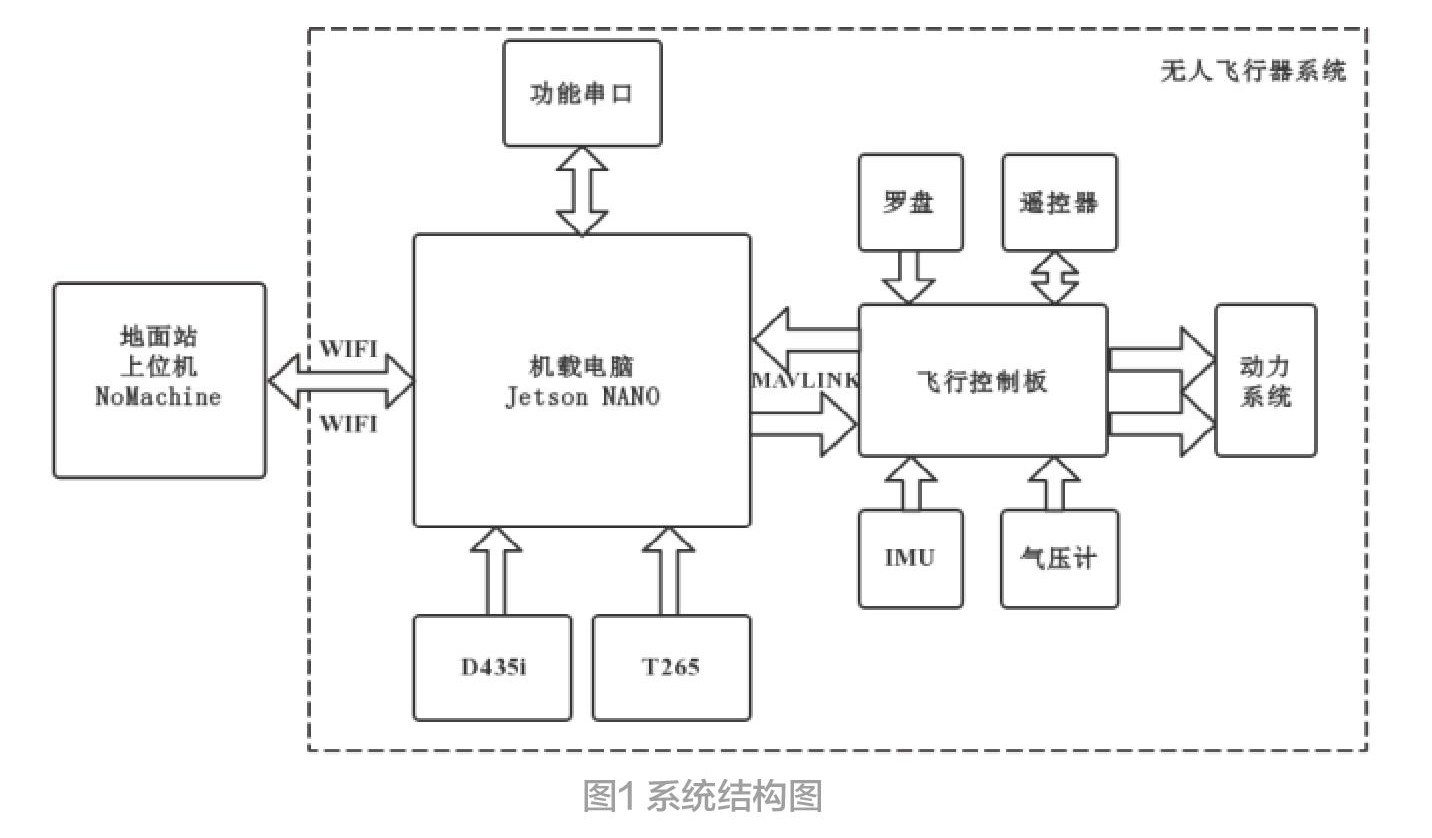
摘要:设计了以多旋翼无人机为平台,基于多传感器融合、ADRC自抗扰控制、YOLOv5目标检测神经网络等技术的室内自主飞行器系统。系统以Jetson NANO为运行平台,采用ACFLY EDU飞行控制板运行核心控制部分,基于Intel RealSense T265的位置信息,融合飞行控制板IMU、高度气压计、TOF等传感器数据对无人机在室内的状态进行估计和修正,使用ROS和MAVROS构建通信系统,以提高无人机在室内飞行的平稳性。(剩余5602字)
