智能汽车横向避障路径规划与控制研究

打开文本图片集
中图分类号:U463.42 文献标志码:A DOI: 10.20104/j.cnki.1674-6546.20250109
Research on Path Planning and Control of Lateral Collision Avoidance forIntelligentVehicle
Tu Ningning, Cao An, Liang Shengping (VOYAHAutomobileTechnologyCo.,Ltd.,Wuhan430056)
【Abstract】Toimprove theefficiencyof lateralcollsionavoidance forintelligent vehicles,apath planning methodof piecewisecubicpolynomialcurveisproposedtoftthelateralaccelerationrelativetolanereferenceline.Theinterventionpath isobtainedanditis trackedthroughtheLinearQuadraticRegulatorcontrolmethod.Thelaneisdirectlytreatedasreference line,which avoids complicated transform between Cartesian coordinates and Frenet coordinates,with lower computationcost. Basedonkinematicsof VCS,thelateralcollsioncanbeidentifiedandcorresponding boundaryconditionofpathplanningcan be generatedeficientlyesides,aspecialfileringsrategyofpotentialcollsionwasproposed,whichbngsamoreccate objectselection.Forscenariosofhighlateral velocity,theweightsoflateralerrorandheadingerorwereoptimized.The corresponding maximum control error can be reduced by 0.1m ,which satisfies the request of collision avoidance and driving comfort.
Keywords:Intelligent vehicle,Lateral collision avoidance,Reference line,Piecewise cubic polynomial curve,LinearQuadratic Regulator (LQR)
1前言
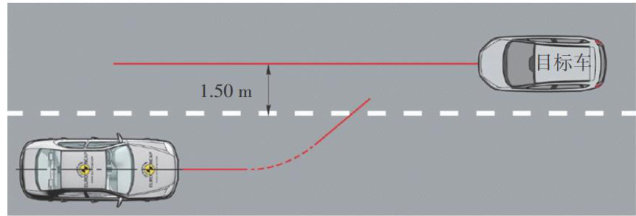
当开放道路上行驶的车辆接近障碍物时,驾驶员可通过制动或者转向完成避障。(剩余8989字)
