面向场景的自主代客泊车预期功能安全研究

打开文本图片集
中图分类号:U467.1 文献标志码:A DOI:10.20104/j.cnki.1674-6546.20240294
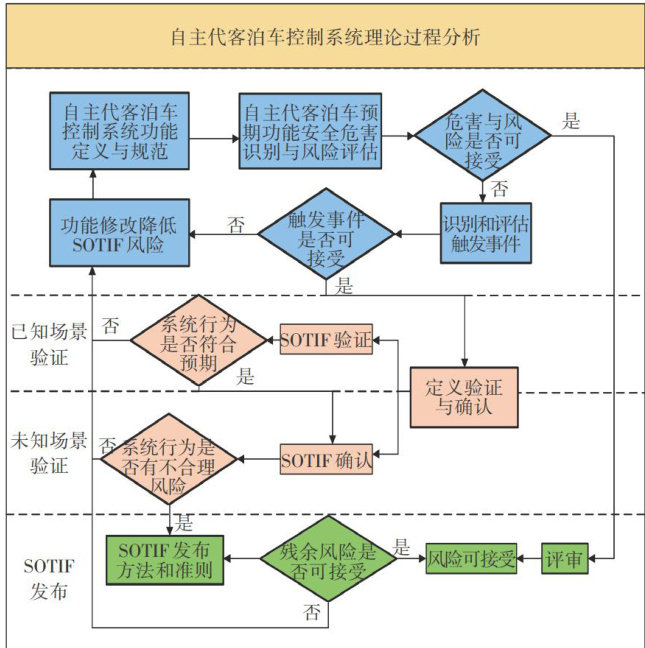
【Abstract】Inorder to facilitateacomprehensive understanding of theAutonomous ValetParking (AVP)systemincluding its behavioral limitations,andtoensureitsafetyOfTheIntendedFunction (SOTIF),thepaperproposestheSOTFanalysis processfor AVP systems.This procedure synthesizes the ISO 21448 and the System Theory Process Analysis (STPA)method, andelaboratesonsystemsafetyand triggeringconditions,layers triggeringconditionsandcombines withfuzzycomprehensive evaluationtobuild SOTIF scenarios.Theevaluationemployscollsion distancerisk,collsion timeriskand braking decelerationriskaskeyperformance indicators.The Criteria Importance Through Intercriteria Corelation (CRITIC)and Technique for Order Preference by Similarityto Ideal Solution (TOPSIS)methodsareutilized for index weightingand evaluation.Finaly,SOTFsoresofAVPsystemsunderdferentscenarios arebtainedthroughealvehicletesting,claifing unsafe scenarios and providing targeted guidance for product optimization.
Key words: Intelligent transportation,Automated valet parking,Fuzzy comprehensive evaluation,SafetyOf TheIntended Functionality (SOTIF)
【引用格式】姜文义,高婷婷,乔永禄,等.面向场景的自主代客泊车预期功能安全研究[J].汽车工程师,2025(5):13- 22+28. JIANGWY,GAO TT,QIAOYL,etal.Research onIntendedFunctionalitySafetyof Scenario-Oriented AutomatedValetParking[J].AutomotiveEngineer,2025(5): 1 3 - 2 2 + 2 8
1前言
基于已知停车场静态环境地图,自主代客泊车(AutomatedValetParking,AVP)系统能够快速高效地规划出面向场景的可行路径,成为解决自动驾驶“最后一公里问题”的有效手段。(剩余10057字)
