目标检测与光流融合的对象级动态同步定位与地图构建方法

打开文本图片集
中图分类号:TP391 文献标识码:A
doi:10.37188/OPE.20253308.1313 CSTR:32169.14.OPE.20253308.1313
Abstract: Most existing visual Simultaneous Localization and Mapping (SLAM) systems assume a static environment. This assumption leads to significant degradation in positioning accuracy in dynamic scenes.
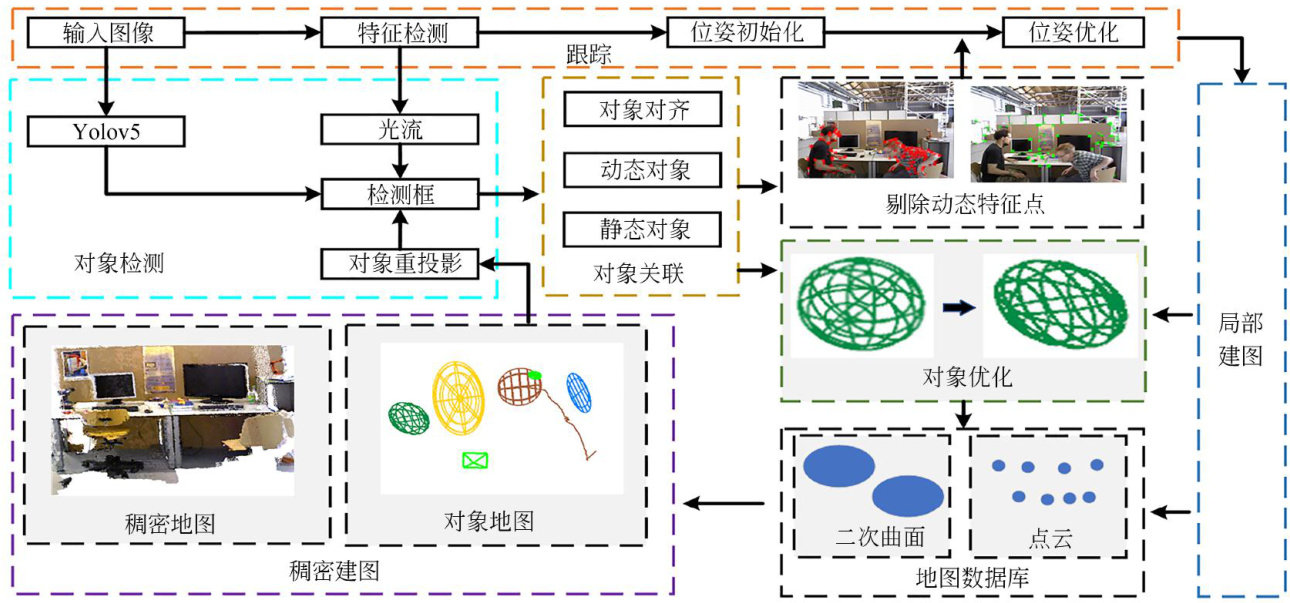
To address this limitation,this paper introduced an object-level dynamic SLAM method. The method integrated object detection with optical flow techniques. Object detection was used to acquire detailed semantic information about objects. Optical flow and object reprojection technologies were employed to distinguish between static and dynamic objects. Feature points associated with dynamic objects were subsequently removed.An optimal matching relationship was established between detected objects and map objects.Static objects were optimized within keyframes to improve localization accuracy. A dynamic quadratic surface optimization strategy was introduced. This strategy optimized dynamic quadratic surface models in the object map.It also enabled the tracking of dynamic object trajectories. Finally,the method reconstructed a dense static background. Experiments were conducted on the Bonn and TUM datasets.The results demonstrate significant improvements in accuracy. Absolute pose accuracy improves by 44.3% .Relative pose accuracy improves by 19.0% . These findings confirm that our method can deliver more precise and robust localization in dynamic scenes. To further validate the system's online performance,real-world dynamic scenarios were tested. The experimental results met the expected performance standards.These tests confirmed the system’s reliability in practical applications.
Key words: dynamic scenes;SLAM;optical flow;quadratic surface;object detection
1引言
相较于激光SLAM,视觉SLAM技术以其成本低廉、易于集成及功耗较低等优势,在自动驾驶、移动机器人、增强现实(AR)、虚拟现实(VR)以及无人机等领域展现了显著的应用潜力。(剩余17699字)