基于关键平面的异质特征融合视觉惯性SLAM系统

打开文本图片集
中图分类号:TP391 文献标识码:A
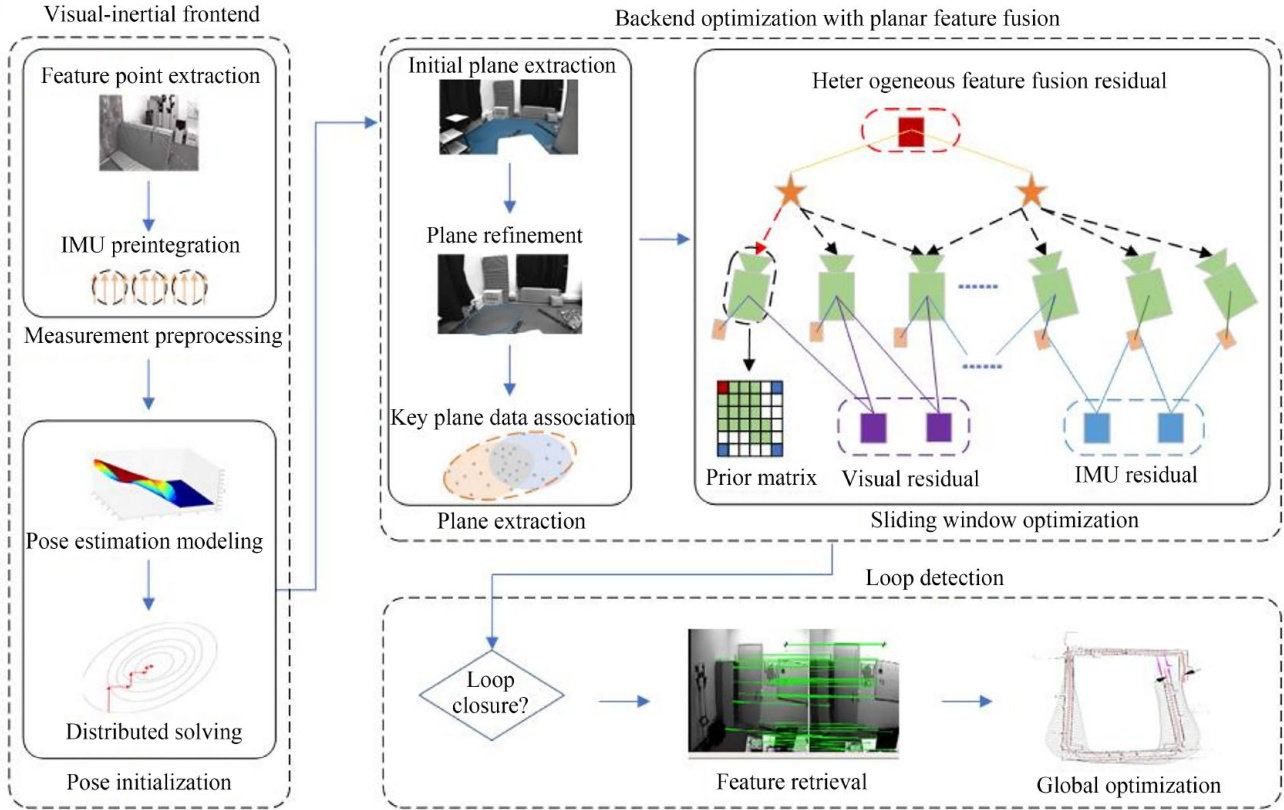
Abstract:Planar feature is widely used in structured environments as a high-level geometric feature and is a good complement to most Simultaneous Localization and Mapping (SLAM) systems. In order to address the fact that new errors were introduced when fusing feature points with planar features and the possibility of planar degradation existed,we proposed a monocular visual inertial SLAM system that fuses heterogeneous features in this paper. Firstly,feature points were extracted from grayscale images;secondly, the set offeature points was triangulated and the results of the triangulation were transformed to the world coordinate system. Next,the initialization process was modeled as a constrained optimization problem and solved with the alternating-direction multiplier method ina distributed fashion.Then,the similar planes were clustered and the planes were fitted with the proposed planar colision probability model to get the cor responding bounded-plane parameters. Finally, geometric constraints on the plane features were introduced in the factor graph,and the camera motion as wellas the plane parameters were simultaneously optimized by the eror model. Compared with the typical visual inertial SLAM system VINS,the mean absolute trajectory error of the system proposed in this paper was reduced by 50% in the EuRoC dataset. The mean absolute trajectory error on the TUM-VI dataset was reduced by 40% . The method works stably and continuously in structured scenes and improves the localization accuracy and robustness in weakly textured regions.
ey Words: Simultaneous Localization and Mapping(SLAM); visual inertia; distributed solving; bounded plane extraction;nonlinear optimization
1引言
随着计算平台与传感器定位技术的不断发展,SLAM技术取得了长足的进步。(剩余19190字)