基于全区间航向误差预测与校正的惯性行人导航算法研究

打开文本图片集
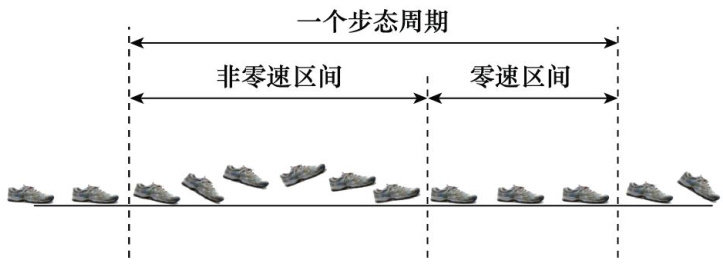
关键词:惯性行人导航;零速区间;非零速区间;航向误差预测与校正;卡尔曼滤波 中图分类号: V249.32+2 文献标志码:A DOI:10.12305/j.issn.1001-506X.2025.05.28
Abstract:Aiming at the problem of heading angle divergence in inertial pedestrian navigation,an algorithm based on heading error prediction and corection across the entire area is proposed.Using the stable heading characteristics within thezero-velocity interval to calculate heading erors,and combining with the short-term stabilityof the gyroscope to predict heading errors in non-zero-velocity interval.By using Kalman filtering to comprehensively correct navigation errors,the accuracy of pedestrian navigation is significantly improved.The experimental results show that in non closed concave paths,the average navigation trajectory eror of the proposed algorithm isonly 0. 94m ,whichis 75.33% lower than the zero speed correction algorithm and 48.91% lower than the algorithm that only processes heading errors during the zero speed phase.In the 400m closed path test,the endpoint position error is only 2.53% ,and the calculated path best matched the actual motion trajectory,verifying that the proposed algorithm can significantly improve theaccuracy of pedestrian navigation.
Keywords:inertial pedestrian navigation;zero-velocity interval;non-zero-velocity interval;heading error prediction and correction;Kalman filtering
0 引言
随着科技发展,微机电系统不断成熟,微型惯性测量组件(micro inertialmeasurementunit,MIMU)得以小型化、低成本化,并保持较高的测量精度,为行人导航带来革命性的变革,成为导航领域的研究热点[1-4]。(剩余13162字)
