数字压电叠堆执行器:原理、建模与控制

打开文本图片集
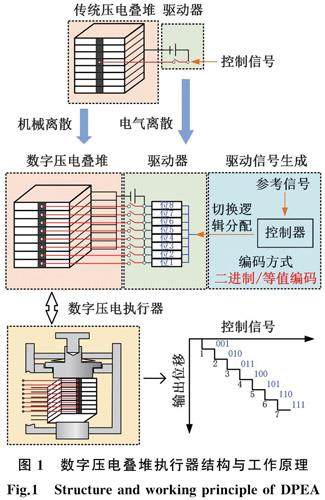
摘要:针对高精度驱动需求,从新型离散构型和数字驱动原理出发,首先探究不同数字编码方式下数字压电叠堆执行器的动、静态输出特性;其次探究数字驱动下迟滞减小的内在机理,结合非线性动力学数学建模描述执行器的迟滞、蠕变和动力学等特性;最后提出数字开/关时间控制来消除剩余迟滞,进一步提高定位精度。实验结果表明,相比传统压电叠堆,数字压电叠堆迟滞减小66%以上,所提的建模方法在10 Hz以内均方根误差小于0.3889 μm,所提的数字开/关时间控制方法能够在10 Hz以内有效消除执行器剩余迟滞特性的影响。(剩余14650字)
