基于改进人工势场算法的煤矿井下机器人路径规划

打开文本图片集
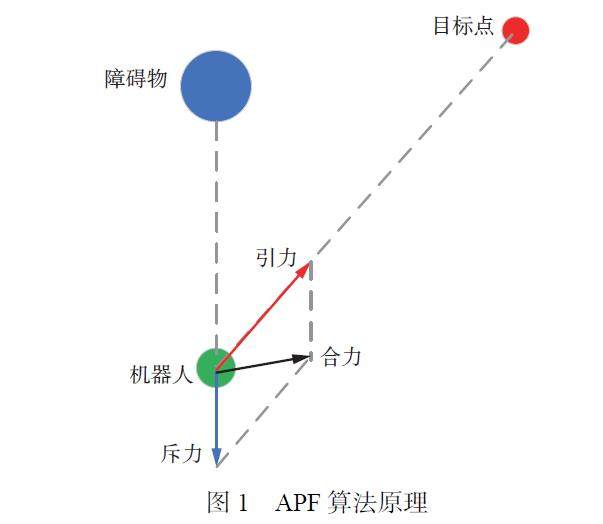
摘要:路径规划是煤矿机器人在煤矿井下狭小巷道空间中应用亟待解决的关键技术之一。针对传统人工势场(APF)算法在狭小巷道环境中规划出的路径可能离巷道边界过近,以及在障碍物附近易出现目标不可达和路径振荡等问题,提出了一种基于改进APF 算法的煤矿机器人路径规划方法。参考《煤矿安全规程》有关规定建立了巷道两帮边界势场,将机器人行驶路径尽量规划在巷道中间,以提高机器人行驶安全性;在障碍物斥力势场中引入调节因子,以解决目标不可达问题;引入转角限制系数以平滑规划出的路径,减少振荡,提高规划效率,保证规划路径的安全性。(剩余10433字)
