基于DBO-LQR和MPC的智能车轨迹跟踪控制

打开文本图片集
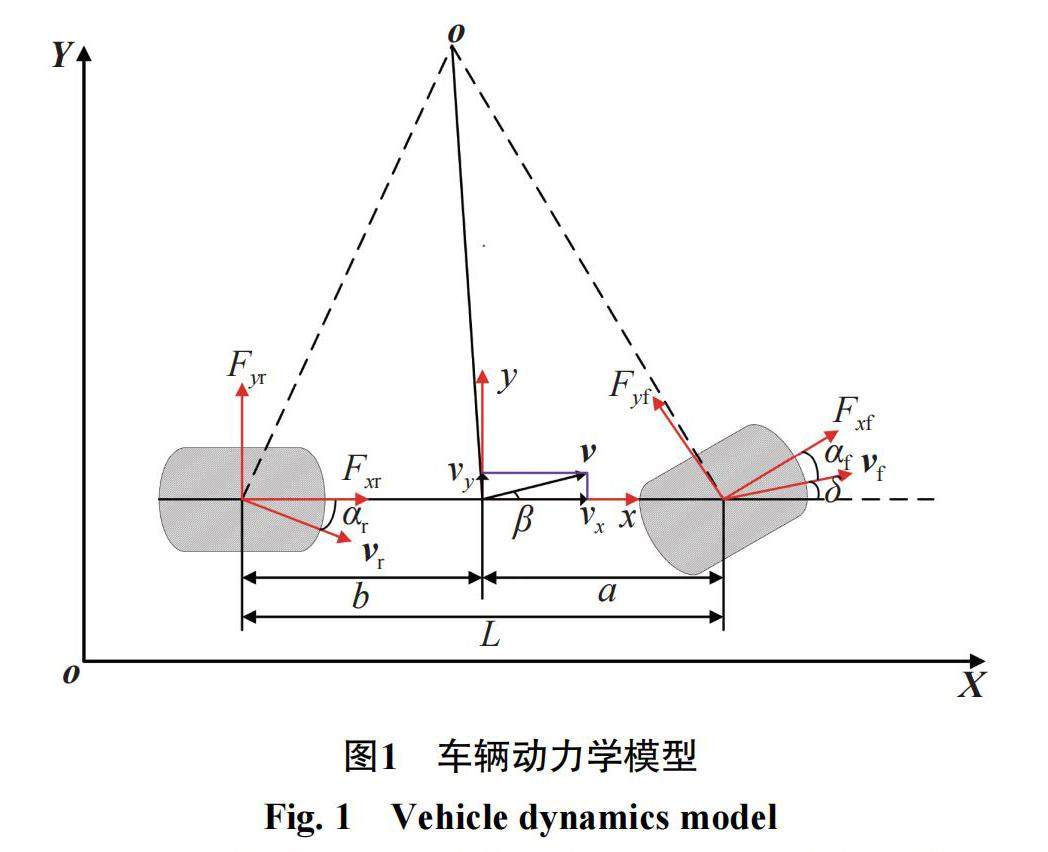
摘要:为提高智能车辆轨迹跟踪的精度和稳定性,提出1种基于蜣螂优化(DBO)算法优化的线性二次型调节器(LQR)与模型预测控制(MPC)的横向、纵向控制策略。构建车辆动力学模型和基于Frenet坐标系下的横向误差模型,设计带有前馈的横向LQR控制器,利用蜣螂优化算法确定LQR控制器权重系数;基于MPC实现纵向速度和位置的跟踪,利用纵向速度联结横向控制器与纵向控制器,同时对车辆的速度和转向进行控制;最后基于CarSim和Matlab/Simulink联合仿真平台在不同道路工况下进行仿真实验,验证所提策略的有效性。(剩余10726字)