基于前馈型变论域模糊PID控制的智能小车轨迹跟踪方法

打开文本图片集
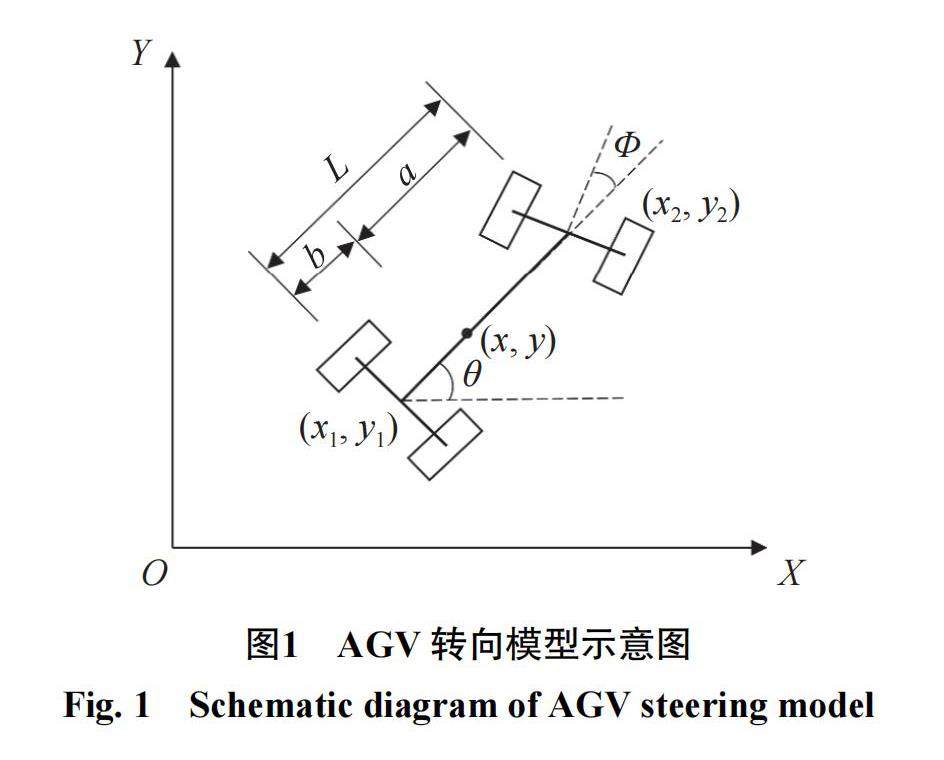
摘要:为提高智能小车轨迹跟踪的精度及抗干扰能力,提出1种基于前馈型变论域模糊控制方法。以自动导向小车(automated guided vehicle,AGV)为研究对象,建立小车运动学模型对其进行动力学分析;在保持主控制参数不变的情况下,将前馈控制加入变论域模糊控制,搭建前馈型变论域模糊PID(proportional-integral-derivative)控制系统,通过变论域模糊PID控制调整参数使系统获得较好的稳定性,再通过调整前馈控制参数使系统的目标跟踪性能达到最佳;设定S形曲线跟踪路线,在Matlab/Simulink平台下搭建传统PID、模糊PID、变论域模糊PID及前馈型变论域模糊PID等4种控制模型进行仿真实验,比较验证本文方法的控制性能。(剩余10859字)