基于BEV多模态特征融合的三维目标检测算法

打开文本图片集
关键词:BEV特征;数据预处理;全局注意力融合;KITTI数据集;三维目标检测中图分类号:TP391.4 文献标志码:A 文章编号:1001-3695(2025)12-038-3823-09doi:10.19734/j.issn.1001-3695.2025.03.0101
3D object detection algorithm based on BEV multimodal feature fusion
Li Xun1,Zhang Youbing1,2†,Zhou Kui1,Fu Yongzhi1,Song Jie1 (1.Sring-XJntbolfeltc,ubeo ShiyanHubei 4420oo,China;2.Jingchu Universityof Technology,Jingmen Hubei448000,China)
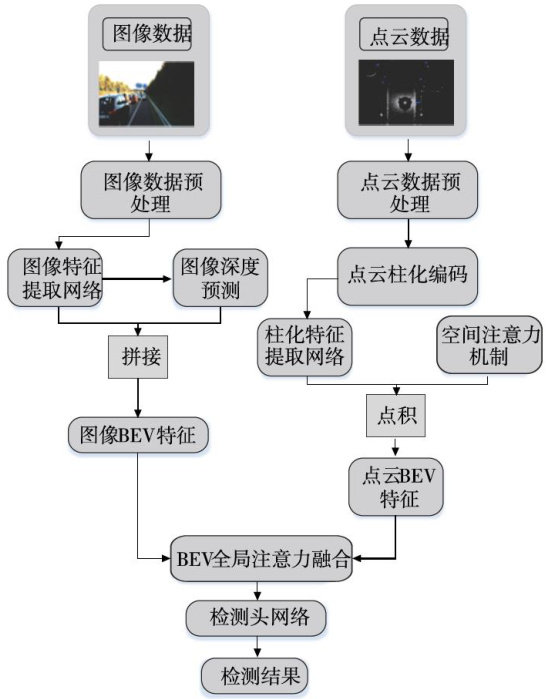
Abstract:Toaddress the problemof isuffcientdetectionaccuracyforsmalltargetobjectsinmultimodalfusionalgorithms, this paper proposeda3DobjectdetectionalgorithmbasedonBEVmultimodal featurefusion(BEV-MFDet).Firstly,thealgorithmuniformlynormalizedtheimages toreducethediferenceinfeaturedistributionandappliedradiusfilteringandground fiting tothepointclouddatatoeliminatetheinfluenceofinvalidpointclouds.Atthesametime,thecolumnarnetwork integratedthespatialatentionmodule toenhanceitsabilitytolearpillrfeatures.Secondly,theBEVglobalattentionfusion moduleadaptivelyalocatedmultimodal weightstomore acuraterepresentationofscenefeatures.Experimentalresultsonthe KITTI dataset showthatthe proposedalgorithmachieves thebestoverallperformanceinmedium-diffcultydetection tasks.In particular,the detection accuracy of the small target cyclist class improves by 2.51% and 1. 75% compared to the CenterPoint andLINalgorithms withbetercomprehensive performance,respectively.Theexperimentalresults demonstrate thatthe proposedalgorithmhassuperiorperformance insmalltargetdetectionaccuracyandoveralldetectionperformance,and hashigh application value.
Key Words:BEV features;data preprocessing;global attention fusion;KITTI datasets;3D object detection
0 引言
随着人工智能技术的持续演进,自动驾驶技术已成为智能交通发展的核心方向。(剩余18597字)
