双电机电动汽车驱动防滑控制

打开文本图片集
中图分类号:U469.72 文献标识码:A
Acceleration Slip Regulation Control of Dual-motor Electric Vehicle
WANG Jixian,CHEN Huanming,ZHANG Heng,DANG Buwei (Collge of Mechanical and Electrical Engineering,Qingdao University,Qingdao 266o71,China)
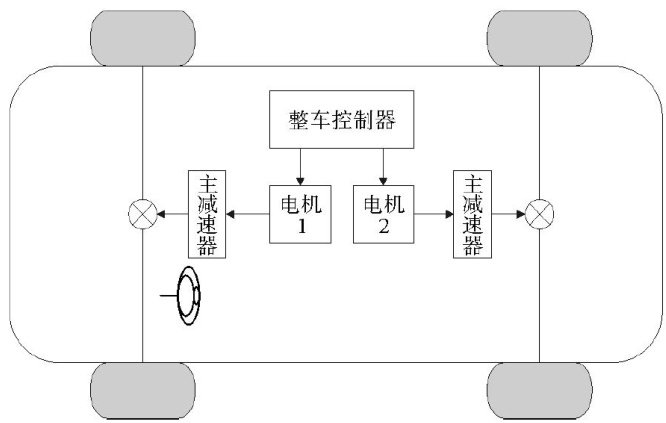
Abstract: In order to maintain the handling stability of electric vehicles under different road conditions and ensure the good power performance and steering ability of vehicles. The fuzzy control theory was used to identify the maximum adhesion coeficient of the current road surface and determine the optimal slip rate of the road surface. Aiming at the optimal slip rate, the output torque of the motor is adjusted based on the sliding mode control theory to realize real time tracking of the wheel slip rate and maximize the power of the vehicle. The acceleration slip regulation control of dual-motor four-wheel drive vehicle was designed by Simulink,the vehicle model was built by Carsim,and the feasibility of the control was verified by joint simulation. The results show that the error of vehicle identifying the optimal road slip chamber is less than 7% when the drive acceleration slip regulation is involved. When the left and right road surface of the vehicle changes,the maximum lateral displacement and maximum steering wheel angle of the driving acceleration slip regulation control vehicle are 40% and 15% of the non-control vehicle,and the lateral stability optimization is obvious.
Keywords: dual motor drive;acceleration slip regulation; fuzzy control; road identification; sliding mode control
纯电动汽车靠电池驱动,有着噪声低、零污染排放等优点,是目前汽车发展的重点[1]。(剩余8129字)
