注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
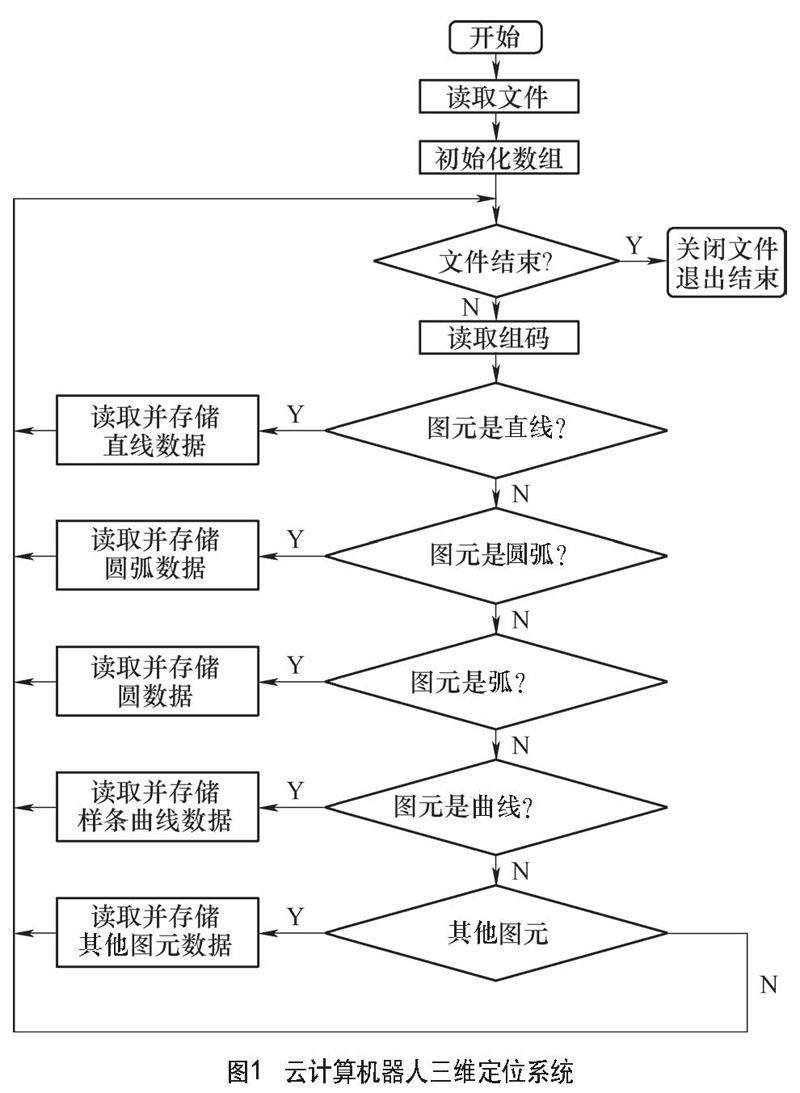
摘要:采用圆心计算方法与平面计算方法,可以得知工件的尺寸数据,然后对工件进行加工,解决了重复定位精度低、容易偏离轨迹及需要反复校对等技术难题。
关键词:云计算;机器人;图像处理;视觉定位;轨迹识别;通信技术。
随着数字经济的快速发展,国家出台一系列政策,云计算数据定位系统发展已是大势所趋。基于云计算的机器人三维定位方法是将其与计算机的视觉控制系统联系起来,能够决定计算机在操作中的定位精准度和精确性。(剩余4259字)
登录龙源期刊网
购买文章
基于云计算的机器人三维定位方法研究
文章价格:4.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001/1/1 0:00:00