基于 STM32H7的智能视觉捕捉系统设计

打开文本图片集
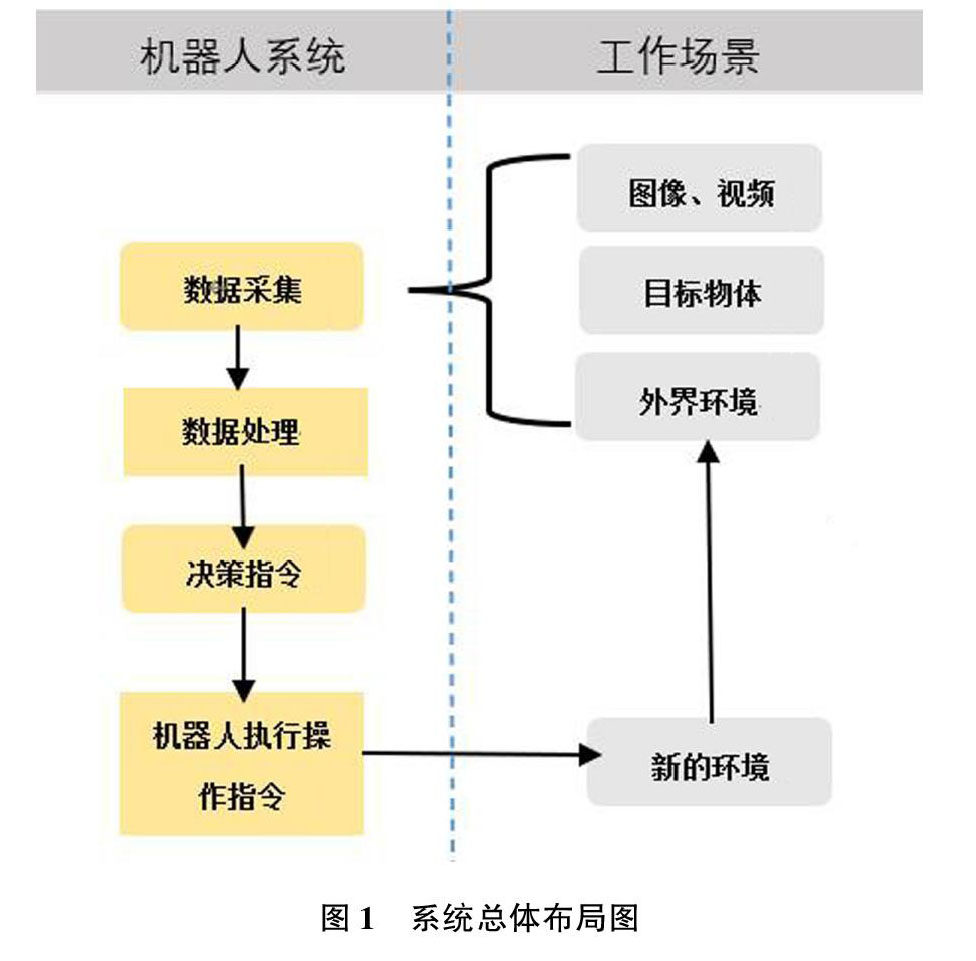
摘要随着国内外对移动类机器人应用领域的不断拓展具有自主搬运功能的智能搬运机器人成为研究热点文章针对球类训练中存在的频繁捡球、换球等现象提出了基于的智能视觉捕捉系统设计该系统以为控制核心结合摄像头驱动利用采集到的物体图像信息通过数字图像处理技术实现目标物体视觉捕捉利用软件算法使机器人能够根据图像信息实现路径自主规划结合笼状结构实现捕捉和运送双重功能
关键词视觉捕捉数字图像处理路径规划
中图法分类号:TP391文献标识码:A
Design of intelligent vision capture system based on STM32H7
SUN Haoran,WANG Binfeng
(Nanhang Jincheng College,Nanjing 211156,China)
Abstract:With the continuous expansion of the application field of mobile robot,it has become one ofthe research hotspots at home and abroad.Aiming at the phenomena of frequent ball picking andchanging in ball training,this paper puts forward the design of intelligent visual capture systembased on STM32H7.At the same time,the software algorithm enables the robot to realize pathindependent planning according to the image information,and complete the dual functions of captureand transportation combined with the cage structure.
Key words: visual capture,digital image processing,path planning
1 引言
在球类运动训练中,对于效率的要求往往很高,本文提出了使用机器人代替人工实现主动式捡球,可以省去很多人力以及节约运动员的时间。(剩余4831字)
