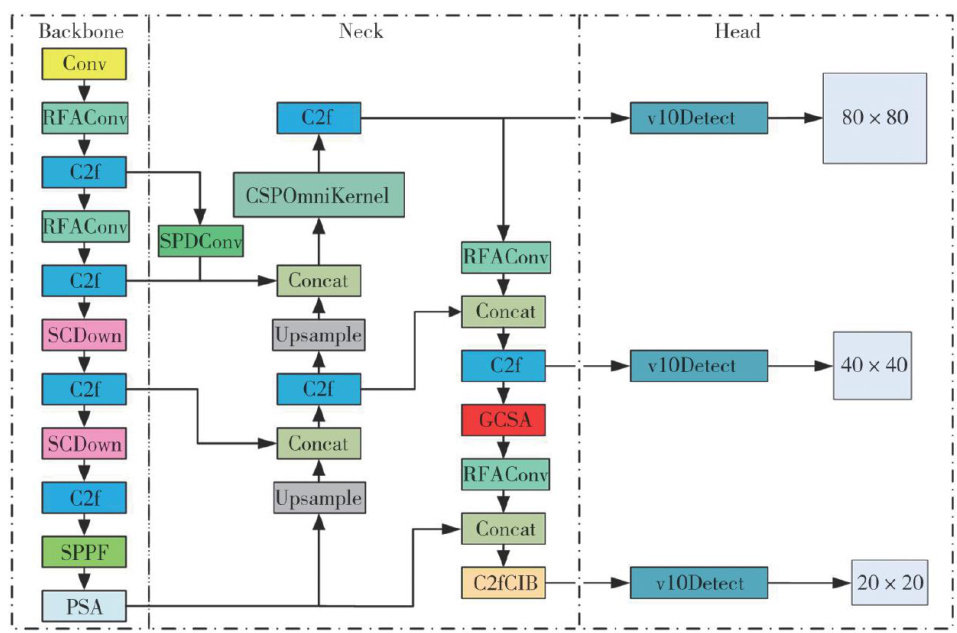
基于RSG-YOLOv10n道路场景抗干扰与小目标检测方法

打开文本图片集
中图分类号:U495;TP391.41 文献标志码:A 文章编号:1672-0032(2025)05-0090-12
0 引言
随着人工智能技术的高速发展,自动驾驶成为智能交通主要研究方向之一[1]。自动驾驶的关键技术是在复杂道路环境中准确识别小目标和特征不明显的物体,并有效应对环境干扰。目标检测技术[2]可为解决这一问题提供支持,特别是基于深度学习目标检测的模型[3],在提高目标识别的精确度和处理速度方面技术优势明显[4]。(剩余18825字)
