管道智能封堵机器人减速运动控制响应分析

打开文本图片集
ResponseAnalysisofDeceleration Motion Control for Pipeline Intelligent Plugging Robot
Wang Shanshan1Jiang Zhengguo² (1.ResearchstituteofureyDsign&IformationTechnologyPetroCinaJidongOifeldCompany;.holofical Engineering,SouthwestPetroleumUniversity)
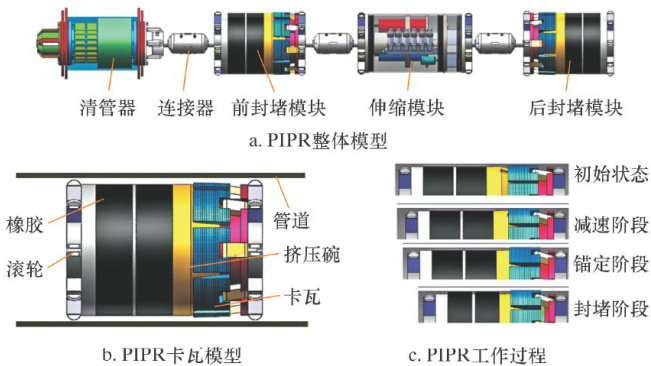
Abstract: Pipeline intelligent plugging robot (PIPR) is an indispensable high-end equipmentfor rapid maintenance and emergency repair operation of pipeline within 12 hours.Achieving eficient and stable deceleration is crucialto the success of plugging operation.A hydraulic controlsystem was designed foraPIPR that uses friction between the slip and the pipe wall to achieve deceleration and positioning.Then,a nonlinear dynamic model of constant deceleration was built for the servo PIPR based on fuzzy PID control.Finall,the numerical simulation method was used to conduct a mechanical-hydraulic co-simulation of the hydraulic control system,and study the influence of important parametersof the control systemon the dynamic control stabilityof the PIPR during the deceleration process.The studyresultsshow that as the initial velocity increases,the centroid accelerationof the PIPR gradually increases,with a maximum overshoot of -3.4m/s2 ,deceleration process control time within 30 seconds,and positioning accuracy within 5% .Increasing the expected deceleration distance can effectively reduce positioning eror;thecapacityoftheaccumulatorshouldbe atleast greater than O.25L.The numberof accumula torshas a relatively small impact on the system.
Keywords:PIPR;dynamic response;fuzzy PID;deceleration control
0 引言
管道是石油、天然气最主要的运输方式,全球陆上 70% 的石油和 99% 的天然气依靠管道运输[]。(剩余12516字)
