永磁吸附储罐爬壁机器人吸附特性研究

打开文本图片集
中图分类号:TP242 文献标志码:A doi:10.3969/j.issn.1006-0316.2025.06.011
文章编号:1006-0316(2025)06-0074-07
Research on the Adhesion Characteristics of Permanent Magnetic Adhesion Storage Tank Wall-ClimbingRobot
MA Mingyue’,GONG Chuanjiang', ZHOU Huaizhong1, JIANG Bo’,LONG Zhang (1. Nanchong Special Equipment Supervision and Inspection Institute, Nanchong 637001, China;
2.School of Mechatronic Engineering,Southwest Petroleum University, Chengdu 610500, China)
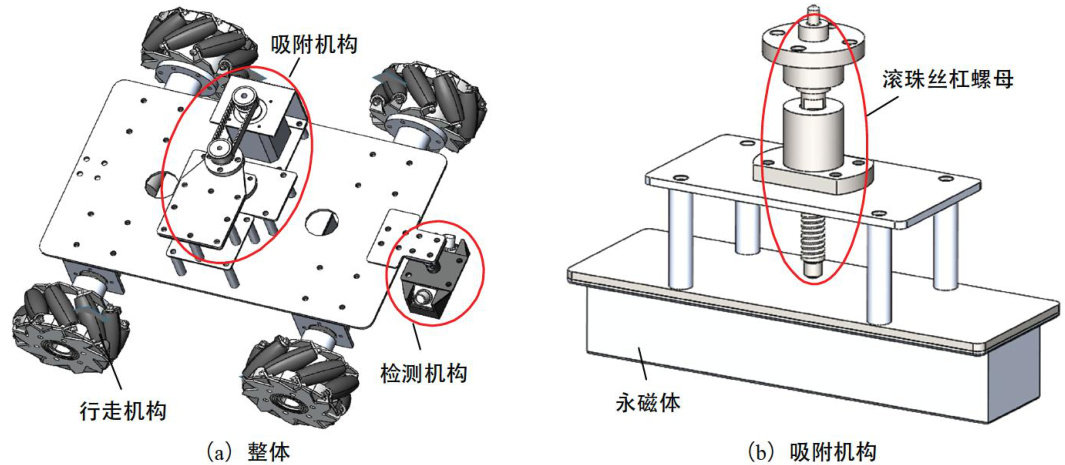
Abstract : In order to solve the problems such as poor climbing stability and potential safety hazards of automatic tank defect detection robot, a permanent magnet adhesion tank wallclimbing robot is designed and its adhesion characteristics are analyzed. The adhesion mechanism based on permanent magnet is designed. The staticmodelof therobotis built through the analysis of the failureof therobotatwork,and the minimum magnetic adhesion force required by the robot in normal work is calculated.In order to ensure that the minimum magnetic adhesion force is taken as the magnetic adhesion condition,the magnetic adhesion unit is designed using the linear Halbach array arrangement of five permanent magnets,and the influence of permanent magnet volume,armatureandair gap length on the adhesion force is analyzed.Through finite element analysis,a cuboid magnetic block with a volume of 30mm×30mm×30mm isfinally designed, the armature size is 150mm×54 mm×3mm ,the addition direction is positive along the Z axis, the rated air gap is 10mm during adhesion, and the minimum magnetic adhesion force is 493.02N ,which could ensure the adhesion stability of the robot.
Key words ∵ magnetic adhesion ; wall-climbing robot ; mechanical analysis ; finite element analysis
大型储罐是油气能源常用的关键存储设备,其在自然环境下长期使用会产生腐蚀、裂纹等缺陷,进一步扩展开裂则会发生泄漏甚至爆炸,导致严重的安全事故,因此相关法规强制规定了储罐需定期检测[1-2]。(剩余5475字)
