基于局部上下文增强的快速3D弱特征目标检测方法

打开文本图片集
关键词:自动驾驶;点云数据;3D目标检测;弱特征目标检测;局部上下文学习 图分类号:TP391.4 文献标识码:A doi:10.37188/CJLCD.2025-0145 CSTR:32172.14.CJLCD.2025-0145
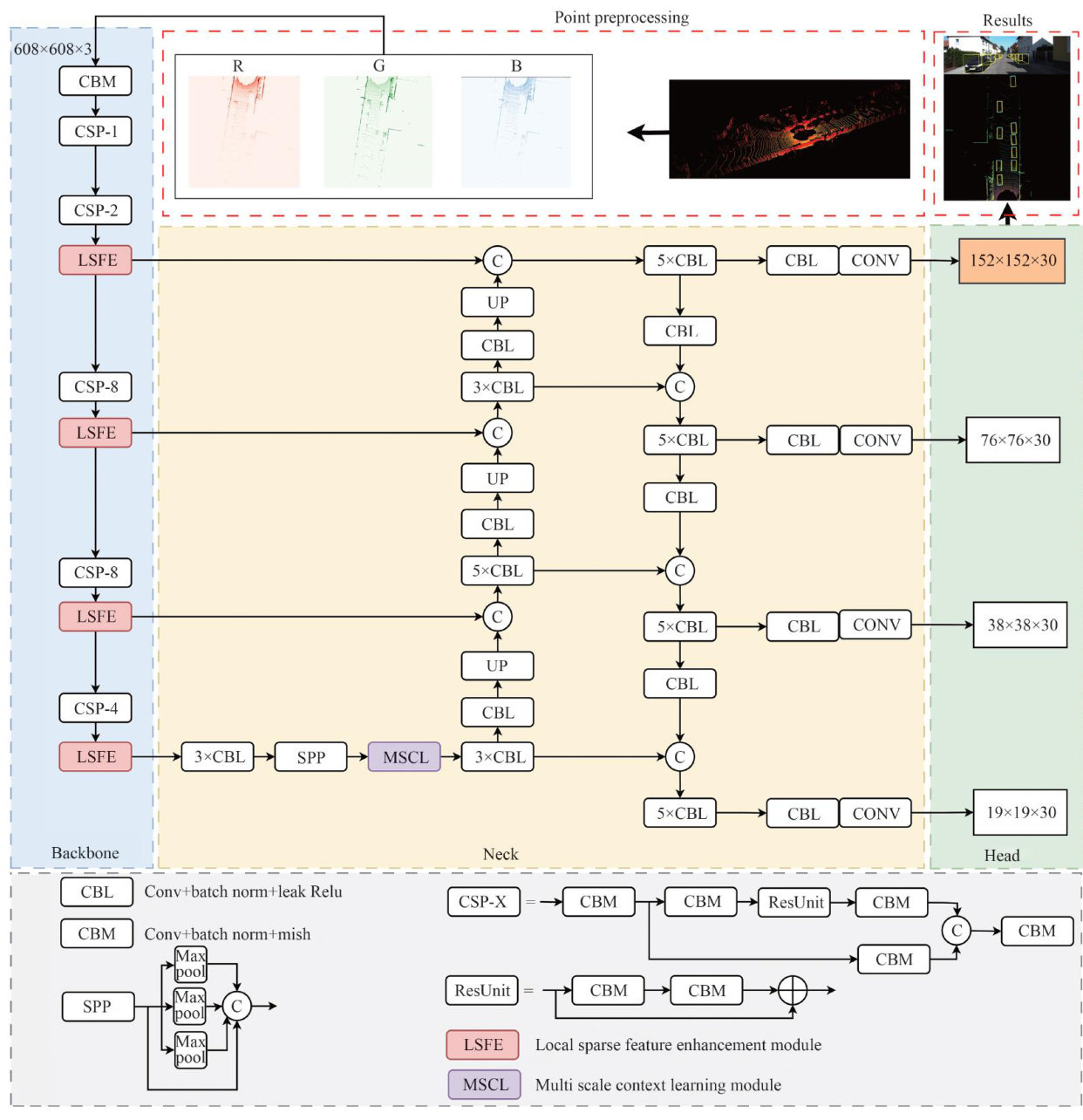
Abstract: 3D object detection has extensive applications in autonomous driving and embodied intelligence,yet it struggles with poor discrimination and high detection dificulty for weak-featured objects in scenes—such as distant,small,or occluded objects.To address this,this paper proposes a fast 3D weak-feature object detection method enhanced by local context. First,to address the challenge of sparse feature representation for weak targets,we introduce the Local Sparse Feature Enhancement Module (LSFE). This module adaptively adjusts feature weights at local spatial positions to enhance the expressive power of sparse features,thereby increasing the model's sensitivity to sparse characteristics. Second,to mitigate background interference affcting weak-featured objects,the Multi-Scale Context Learning Module (MSCL) is introduced. It integrates spatial and channel-wise atention mechanisms to acquire multi-scale contextual information and suppress background noise.Finally,to beter utilize shallow-layer features,a high-resolution feature layer is added to the network's detection head structure, enhancing the perception of object details. Experimental results on the KITTI dataset demonstrate that our method significantly improves detection accuracy for weakly featured objects compared to baseline approaches:mAP increases by 12.78% for Pedestrians, 2.69% for Cyclists,and 6.84% for Cars.Our method achieves high-precision detection while maintaining real-time inference speed,providing an effective solution for 3D object detection in complex scenes.
Key words: autonomous driving; point cloud data; 3D object detection; weak feature target detection; local context learning
1引言
3D目标检测是自动驾驶、具身智能等应用中的关键感知环节,旨在对空间中的目标实例进行精确定位和分类。(剩余17978字)
