面向自动驾驶的驾驶环境视觉感知复杂度量化评估方法

打开文本图片集
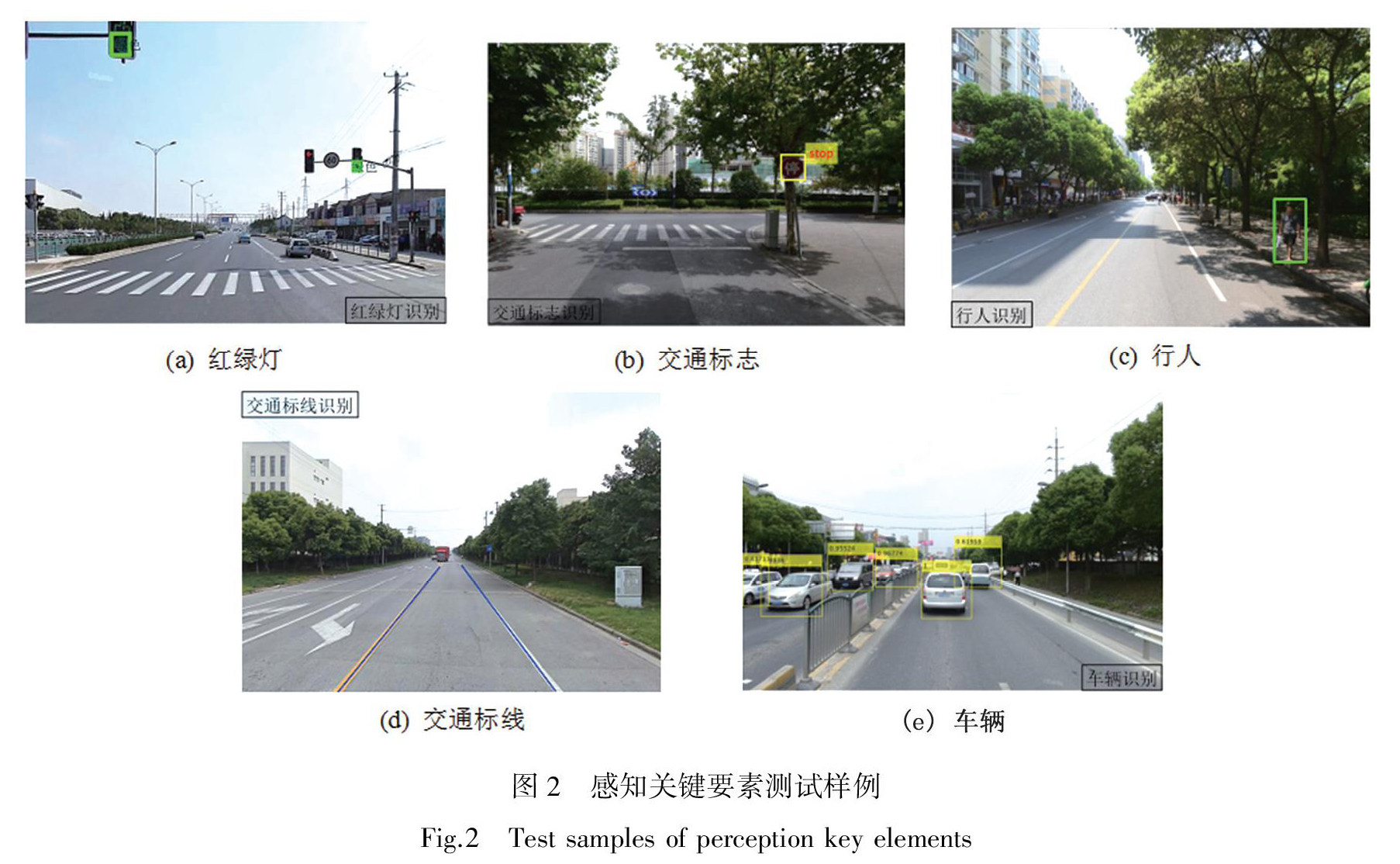
摘要:为优选自动驾驶汽车开放测试、示范道路并支撑其驾驶环境的优化,提出面向自动驾驶的驾驶环境视觉感知复杂度量化评估方法。以百度街景地图作为驾驶环境数据源,运用脚本文件以及截图工具PicPick搭建自动化街景图像数据提取平台,并在不同区域、不同道路等级下采集上海市50条典型道路的驾驶环境数据;从行人、交通标志、交通标线、红绿灯、车辆5方面出发,构建驾驶环境要素感知平台,并开展感知精度的量化评估;在单要素感知准确率的基础上,采用熵权法确定多维感知要素权重,计算各道路综合感知准确率,并应用轮廓系数法与K-means++聚类算法进行视觉感知复杂度分级。(剩余13786字)
