机器人连续性接触状态估计与软组织异常识别方法

打开文本图片集
中图分类号:TP242 文献标志码:ADOI: 10.12475/aie.20250504
文章编号:1674-2605(2025)05-0004-08开放获取
A Method for Robotic Continuous Contact State Estimation and Soft Tissue Abnormality Identification
ZHENG Haochen1,2 LIU Chengpei1ZHAI Xueqian² WU Hongmin2 (1.School ofRail Transportation,WuyiUniversity, Jiangmen529o20,China 2.Institute of Intelligent Manufacturing, Guangdong Academy of Sciences/ Guangdong Key Laboratory of Modern Control Technology, Guangzhou 51oo70, China)
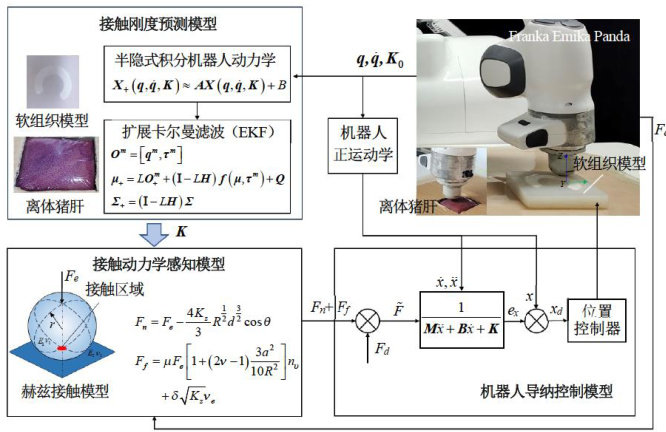
Abstract:Aimingatthe problemsofdificult deformation prediction,unknown contact atributes,discontinuous dyamic models,andlowuracyiboalisseidentificatiurigbotsofttueiteractio,metodforobotoiuouact stateestimationndsofttisseabnormalityidentificationisproposed.ThecontacttiffessispredictedbycombiingaEtended KalmanFilter withsemi-implicit integrationThe Hertzcontact modelandtheCoulombfriction modelareutilized toperceivethe normal contact forceandthecontact fritionforce,respectively.Anadmitancecontrolmodel incorporatingerorfedback is constructed toensureinteractionstability,therebyeablingefectiveidentificationofabnormaltisses.Theeffectivenesand robustnessofteproposedmethodwerevalidatedthroughexperimentsonidentifyingabnomalities insilicone-basedsofttisusand ex vivo porcine liver tissues.
KeyWords: state estimation;abnormality identification;admitance control; contact stiffess; Hertzcontact model; Coulomb friction model
0 引言
在医学领域,软组织异常识别对疾病的早期诊断和精准治疗至关重要[1-3],尤其在肿瘤等异常组织识别过程中,准确区分正常软组织与病变组织是提升诊疗效果的关键[4]。(剩余10090字)
