基于YOLO-DIS的露天矿复杂环境下车辆障碍物检测

打开文本图片集
中图分类号:TD67/634 文献标志码:A
文章编号:1671-251X(2025)11-0104-08
Vehicle obstacle detection in complex open-pit mine environments based on YOLO-DIS
CAOTing,FENGZhidong,GUOHongbo,LUOXiaochun (School ofInformation Engineering,Yulin University,Yunlin 719ooo, China)
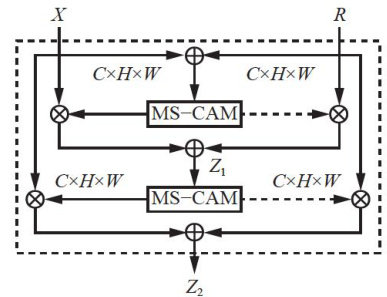
Abstract:To address the problems of missed and false detections in vehicle obstacle detection under the complexconditions ofsevere occlusion,dust interference,and image blurring in open-pit mine operationalareas, this study proposed a YOLO-DIS model based on YOLOvlln for vehicle obstacle detection in such complex open-pit mine environments.To enhance feature extraction capabilityin complex situations,the model introduced an Iterative Attention Feature Fusion (iAFF)mechanism to improve the C3k2 module,strengthening feature extraction through two-stage iterative attention fusion.To efectively compensate for the inaccuraterecovery of edge features in occuded targets caused by fixed sampling rules,lightweight dynamic upsampling wasadopted to replace the original nearest-neighbor interpolation method.This approach dynamically adjusted sampling positions based on target shapeand occlusion by learning sampling point ofsets.Furthermore,to solve the problemof imbalanced sample distribution,the SlideLoss function was employed to asign differentiated weights to samples of varying difficulty levels.Experimentalresults demonstrated that:compared to YOLOvlln,the YOLO-DIS model achieved improvements of 4.4% 。(剩余12627字)
