基于LSTM车速预测和深度确定性策略梯度的增程式电动汽车能量管理

打开文本图片集
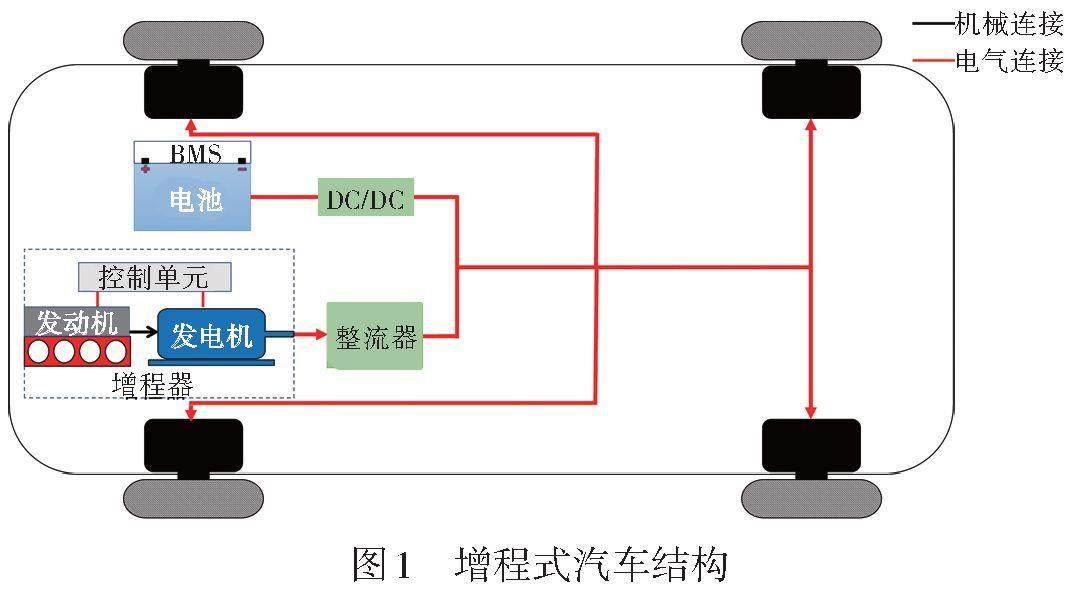
【摘要】为提高增程式电动汽车的能量管理性能,首先利用长短时记忆(LSTM)神经网络进行车速预测,然后计算出预测时域内的需求功率,并将其与当前时刻的需求功率共同输入深度确定性策略梯度(DDPG)智能体,由智能体输出控制量,最后通过硬件在环仿真验证了控制策略的实时性。结果表明,采用所提出的LSTM-DDPG能量管理策略相对于DDPG能量管理策略、深度Q网络(DQN)能量管理策略、功率跟随控制策略在世界重型商用车辆瞬态循环(WTVC)工况下的等效燃油消耗量分别减少0.613 kg、0.350 kg、0.607 kg,与采用动态规划控制策略时的等效燃油消耗量仅相差0.128 kg。(剩余16821字)