基于改进YOLO11的小目标检测

打开文本图片集
中图分类号:TP391.41 文献标识码:A
YOLO11-based Algorithm for Small Object Detection with Perspective Rectification
LIU Yong,BAI Mengfei, LI Xinxin, YAN Mingtao,FU Chaoxing (Collge of Mechanical and Electrical Engineering,Qingdao University,Qingdao ,China)
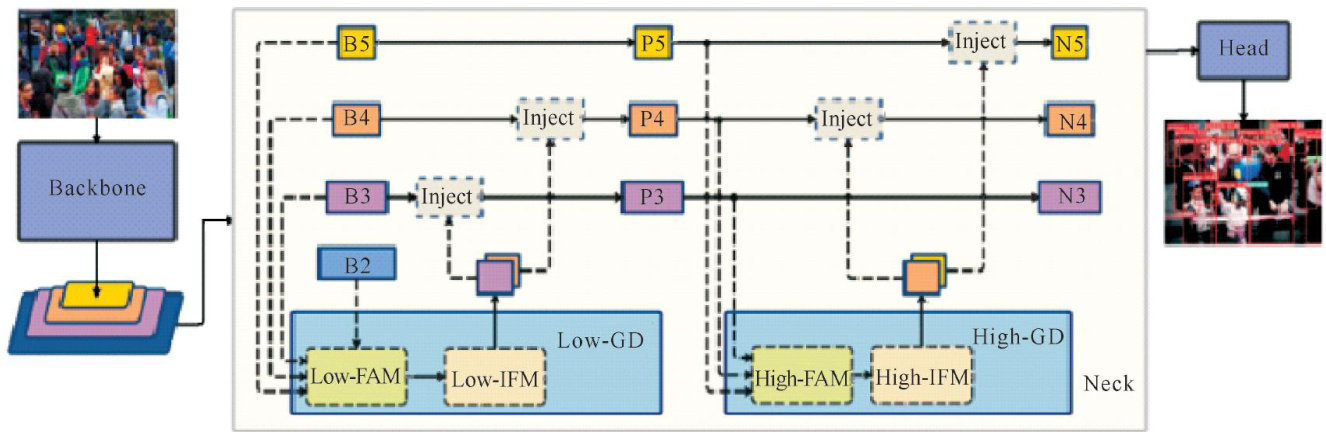
Abstract: Aiming at the insufficient positioning accuracy of tiny targets in the robotic arm workspace under perspective distortion, scale variation, and occlusion interference, a lightweight rotational detection framework fused with Gold-YOLO is proposed to achieve fast and accurate perception of tiny objects in the workspace. Based on YOLOll-obb,the framework introduces the Gather-and-Distribute mechanism of Gold-YOLO to reconstruct the Neck module,while maintaining consistent parameters (2.7M) ,input resolution ( 640×640) ,and training configuration (400 epochs on the RTX-307O platform). Experimental results on a self-built dataset of 900 images demonstrate that the improved model achieves a mAP50 of 95.8% , representing increases of 0.2% compared with the original YOLOll-obb. The single-frame inference time is less than 76ms ,and the recall rate for occluded targets is enhanced from 95.3% to 95.8% . With high precision and real-time performance,the proposed framework provides a reliable visual basis for robotic arm path planning and adaptive grasping.
Keywords: rotation detection; YOLOll-obb; recall rate; adaptive grasping
近年来,智能制造对机械臂的自主决策和精细操作提出了更高要求,视觉感知成为机械臂获取复杂环境信息的核心手段[1-2]。(剩余7414字)