注重基本经验,提升思维品质
——一道函数综合题的解题思考

打开文本图片集
一、原题呈现
二次函数的图象与x轴交于A,B两点,与y轴交于点C,且A(−1,0),B(4,0).
(1)求此二次函数的表达式.
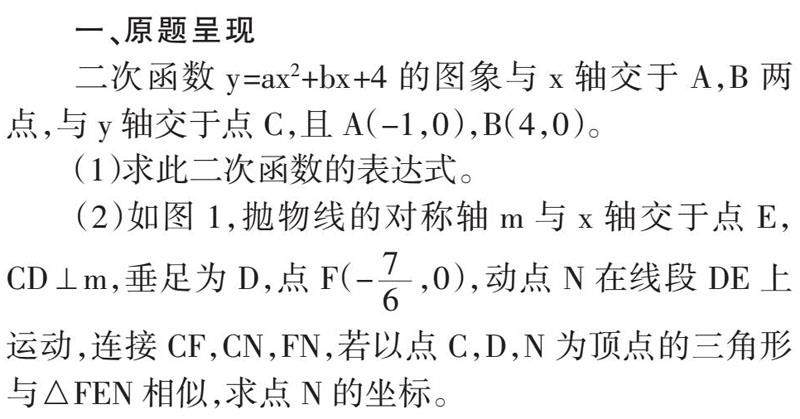
(2)如图1,抛物线的对称轴m与x轴交于点E,CD⊥m,垂足为D,点,动点N在线段DE上运动,连接CF,CN,FN,若以点C,D,N为顶点的三角形与△FEN相似,求点N的坐标.
(3)如图2,点M在抛物线上,且点M的横坐标是1,点P为抛物线上一动点,若∠PMA=45°,求点P的坐标.
分析:这是一道较为典型的二次函数综合题,将三角形知识与二次函数相结合,综合考查学生对于三角形相似的判定和性质,二次函数基本性质的掌握情况,方法比较开放,笔者在此列举(3)的三种常见解法,从不同的角度对此问题进行探究.
(2)解法如下:
解:(1)当x=0时,y=4,∴C(0,4) .设抛物线的表达式为,将点C的坐标代入得:,解得, ∴抛物线的表达式为.
(2)设点N的坐标为则,由于∠CDN与∠FEN对应关系确定,分以下两种情况讨论
① 当△CDN∽△FEN时,即,解得
∴点N的坐标为
(3)② 当△CDN∽△NEF时,即,解得:
∴点N的坐标为
综上所述,点N的坐标为或
二、解法赏析
1 .构造等腰Rt△,利用“三直角”模型
解1:如图3,过A点作AD⊥MP,垂足为D,过D点作x轴的垂线DF,垂足为F,过M点作ME∥x轴,交DF于E,过M点作x轴的垂线MG,垂足为G.
∵∠AMP=45°,AD⊥MP
∴△AMD为等腰Rt△
∴AD=MD
易证△ADF≌△DME ∴ DF=ME,AF=DE
由点M的横坐标是1得M(1,6),∴E点纵坐标也为6即EF=6;
设点D的横坐标为d,又A(−1,0),
则DE=AF=d+1,DF=ME=d-1
又∵DE+DF=EF=6∴d+1+d-1=6 ∴d=3
∴DE=AF=4由△ADF∽△DPF或射影定理可得PF=1
∴P(4,0)
评注:由于45°角的存在,易想到构造等腰Rt△,由A点作垂线,也容易想到.由于构造出的等腰Rt△在平面直角坐标系中是较为“一般”的(没有边坐标轴平行或重合),因此可以通过过直角定点作坐标轴垂线的方法构造“三垂直”模型,结合等腰Rt△的性质,可得一组全等三角形.但此处相等的边只有AD,MD为已知,因此充分利用A,M这两个已知点,发现DE与DF的和为定值,即可解决.
此方法中构造等腰Rt△和“三直角”模型的辅助线,学生能想到,但最后一步建立等量关系求出D点坐标,部分学生方法不够简洁,需要优化.
还有过N点作垂直的方法也类似,不做展开,见图3-1
解2:如图4,过A点作AK⊥AM,交抛物线于K,过A点作x轴的垂线LQ,分别过K,M作x轴平行线交LQ于L,Q点.
∵∠AMP=45°,AK⊥AM
∴△AMK为等腰Rt△
∴AM=AK
易证△AML≌△AKQ
∴ KQ=ML,AQ=AL由点M的横坐标是1得M(1,6),
∴L点纵坐标也为6即AL=KQ=6;
又A(−1,0),则ML=2=AQ
∴K(5,−2)
由M,K坐标解得直线MK的表达式为y=−2x+8
∴ P(4,0)
评注:此方法的思路基本与第一种一致,但算法上更为简洁。(剩余766字)
