多机器人协作中提高装配精度的几种方法分析

打开文本图片集
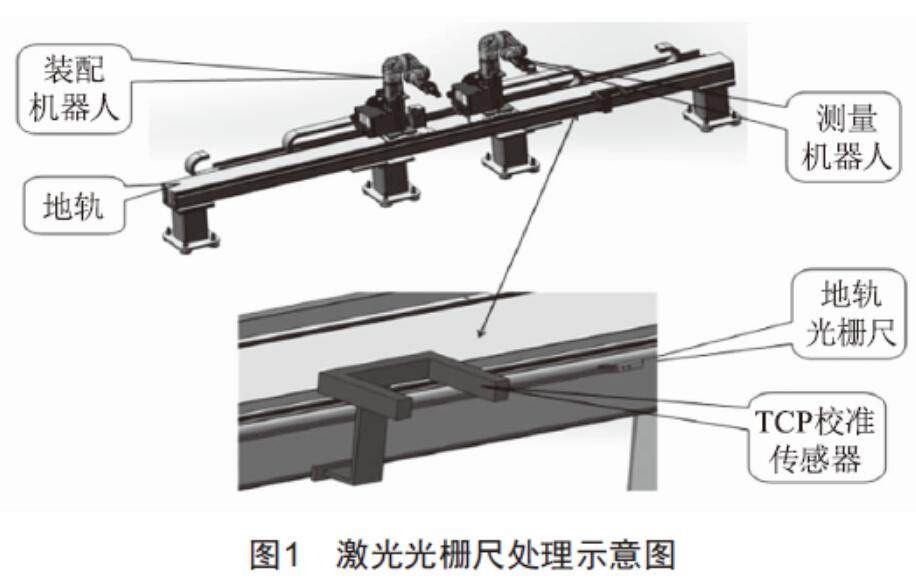
摘 要:针对多机器人协作装配过程中NG次数较多、装配成功率低的问题,应用激光光栅尺、TCP校准和视觉系统,设计了一套装配误差处理系统,以实现多机器人协作装配时的高精度定位,消除了绝大部分系统误差和机器人本体的绝对误差,达到了高精度稳定装配的目的。
关键词:多机器人协作;误差;精度
中图分类号:V465;TP242.6+2 文献标志码:A 文章编号:1671-0797(2022)10-0047-05
DOI:10.19514/j.cnki.cn32-1628/tm.2022.10.013
0 引言
在国内制造业领域的汽车及电子行业,以机器人自动化生产为典型应用的智能制造技术已经很普遍,但航空航天等军工行业智能制造水平反而较低。(剩余4265字)
