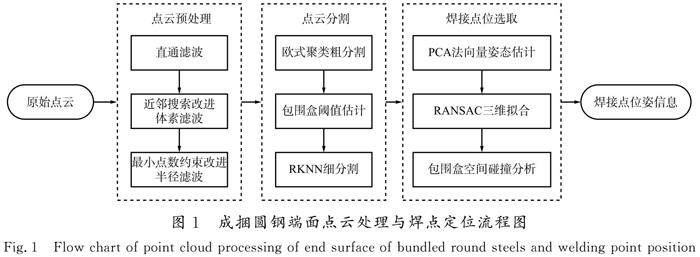
成捆圆钢端面点云处理与标牌焊接点定位方法研究

打开文本图片集
摘 要:为了实现标牌焊接机器人作业准确定位,提出了一种成捆圆钢端面点云处理及焊接点定位方法。首先,在搜索规则、参数调整等方面对传统点云数据滤波方法进行了改进;其次,提出了融合欧式聚类、AABB(axis-aligned bounding box)算法和RKNN(reverse K-nearest neighbor)搜索算法的点云分割算法;再次,考虑焊牌要求制定了焊接点位选取策略,通过法向量估计进行点云姿态校正,采用RANSAC算法对选定圆钢端面点云进行拟合,得到焊接中心点位;最后,进行了焊牌实验。(剩余19035字)
