基于神经网络的多类物体三维位姿获取方法研究

打开文本图片集
目前工业流水线上的工业机器人多数只能完成简单的任务和重复性的工作。社会的进步和技术提高需要更加智能化的机器人。机器视觉的发展和三维建模技术的进步,为机器人完成更加复杂和智能的任务奠定了基础。工业智能仓储技术和智能仓库急需能够自动识别货架上的物体的三维位姿,并能够自动抓取的智能机器人系统。
一、智能仓储技术中货架物体的三维点云数据获取
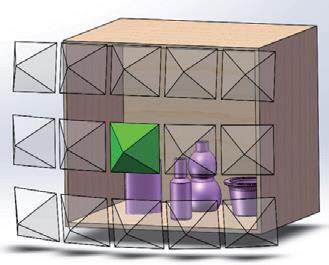
仓库中的货架上往往不规则地摆放了各种各样的物体,这些物体相互之间位姿排列并不整齐,往往相互遮挡和影响,因此三维视觉系统从一个视角拍照获取物体的点云数据经常交叉干扰和影响,只能获取物体的一小部分的三维点云数据,影响物体的后续处理。(剩余2231字)
