基于机器人操作系统的液压机器人自主导航系统设计与实现

打开文本图片集
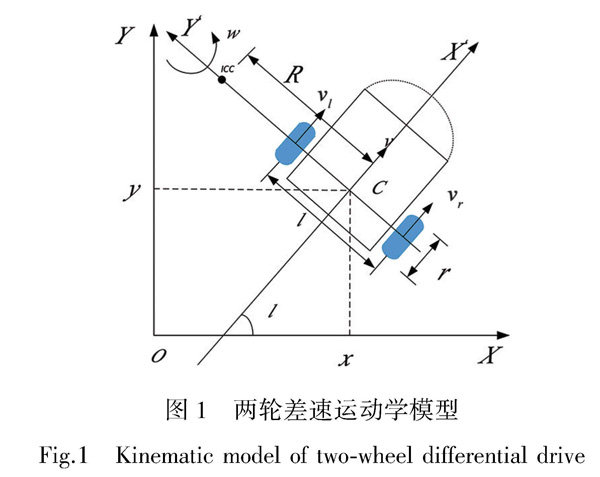
摘要:在机器人两轮差速运动模型分析的基础上,根据运动模型的航迹演算公式可实时计算机器人轨迹姿态。基于机器人操作系统架构平台设计了机器人本体、机器人底座、驱动液压马达、导向轮、激光雷达等7个关节和连接的结构模型。各机器人关节坐标系变换关系经过Tf实时发布,用于计算机器人位置坐标信息。针对液压机器人没有配备编码器和视觉系统的不足,系统采用2D平面激光里程计模型(RF2O),通过建立连续激光扫描点对距离的流约束方程获得机器人平面运动估计,进而得出激光雷达的速度和机器人实际运行轨迹。(剩余10375字)
