基于层次化可导航小世界网络改进的SeqSLAM算法

打开文本图片集
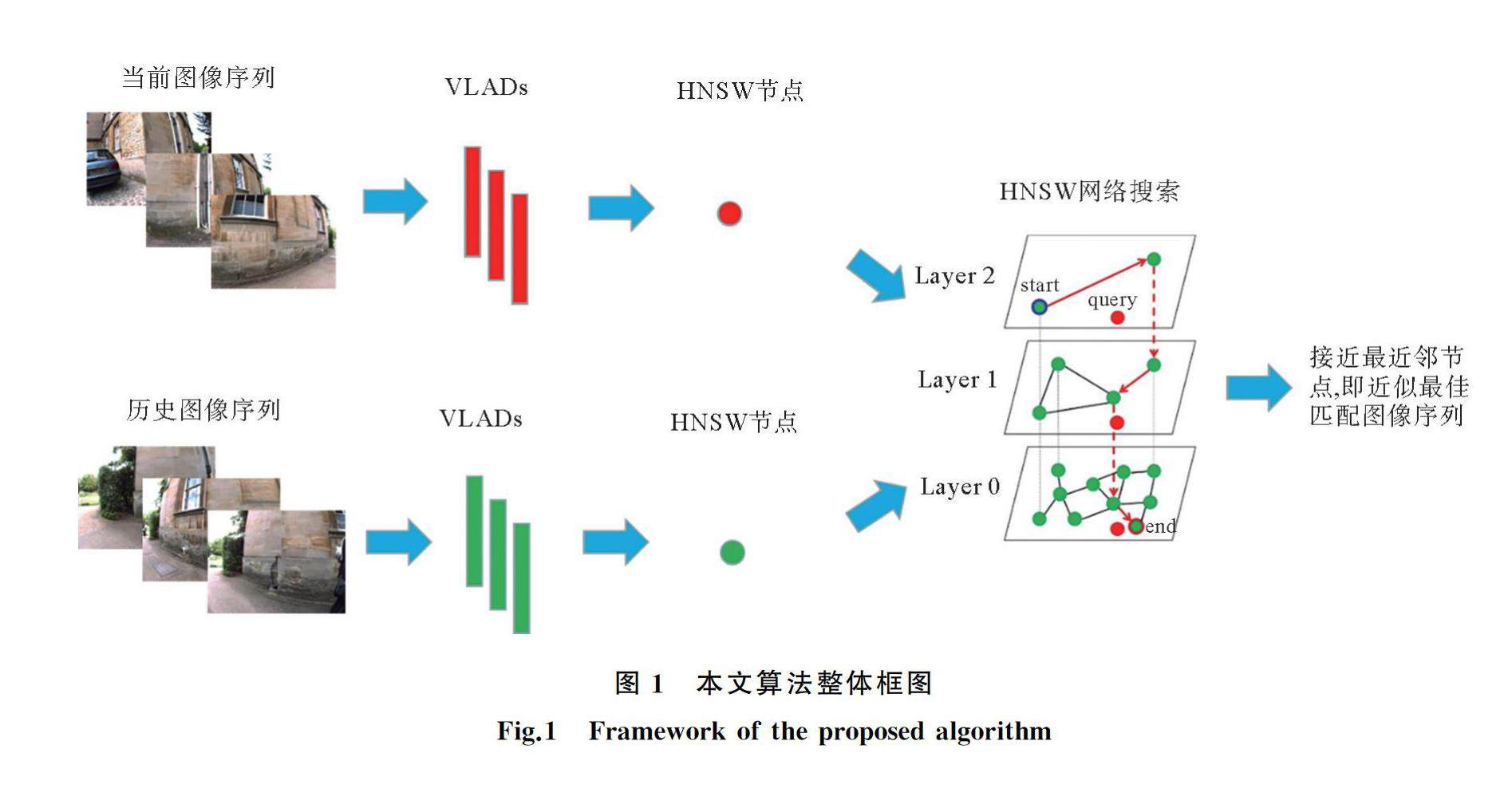
摘要:SeqSLAM是移动机器人领域广泛使用的一种视觉定位算法,它对光照等因素较鲁棒,但受视角变化影响较大。另外,SeqSLAM采用了蛮力搜索匹配的方式,在较大规模数据集中无法满足实时性要求。针对以上问题,对SeqSLAM算法做了两方面的改进:首先将图像表示为局部聚合描述子向量,提取图像特征;然后采用层次化可导航小世界网络算法搜索相似图像序列,具有更高的搜索效率。(剩余9936字)
网站仅支持在线阅读(不支持PDF下载),如需保存文章,可以选择【打印】保存。