自适应卡尔曼滤波与PSO-GA-BP算法的机器人误差补偿

打开文本图片集
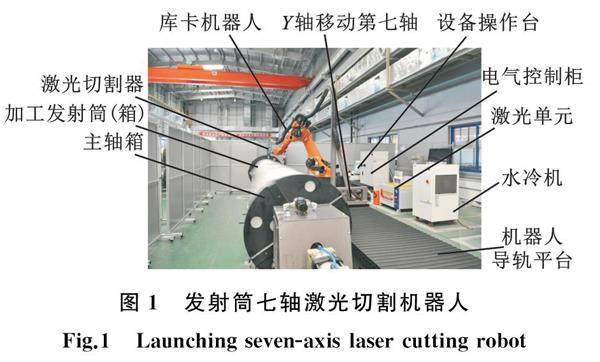
摘要:采用七轴机器人设备夹持激光器的方式对某型号发射筒进行切割开孔加工。在加工过程中,因轨迹精度和绝对定位精度较低,容易对型号产品发射筒产生损伤和误差切割等问题,运用D-H算法建立七轴机器人理想模型,运用正逆运动学数值算法对理想模型进行验证,运用理想模型的理论位姿参数和激光跟踪仪的测量位姿参数基于Sage-Husa自适应卡尔曼滤波求解七轴机器人真实位姿坐标信息,得到理想位姿参数和真实位姿坐标信息的关节误差,然后结合粒子群优化-遗传算法-BP神经网络联合算法对七轴机器人建立误差预测模型,采用七轴机器人理论位姿参数作为输入样本,真实位姿与理论位姿的各关节角度差作为输出样本,通过库卡机器人Workvisual 5.0软件按照模型输出值对七轴机器人的各关节角度值进行补偿。(剩余11596字)
