电力GIS巡检机器人沿狭小空间管道内壁攀爬特性分析

打开文本图片集
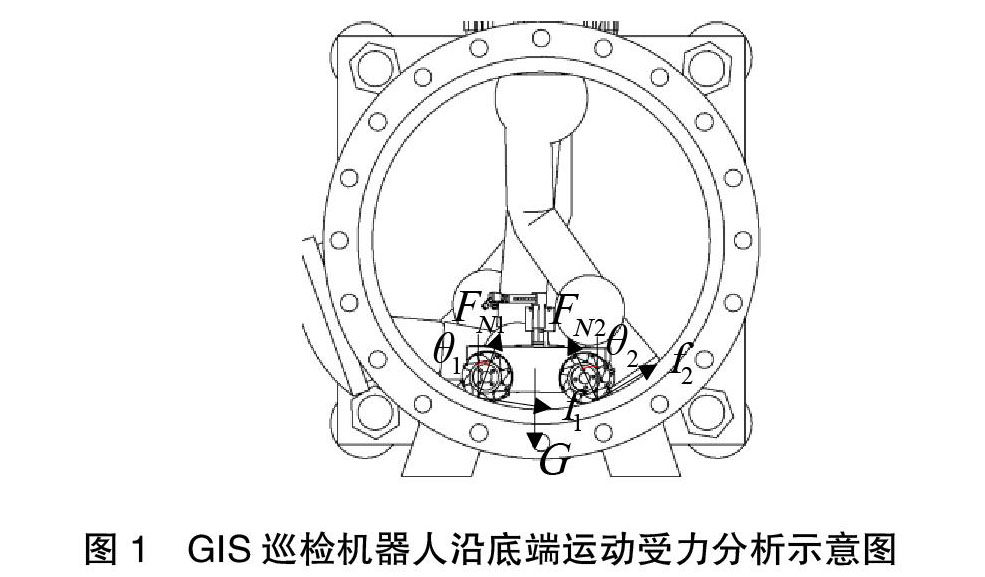
摘 要:提出了一种利用GIS巡检机器人进入GIS管道进行巡视和检修作业的新方法,首先给出了GIS巡检机器人的基本结构,GIS巡检机器人要实现整个GIS装备内部无盲区的检修作业,要求机器人能够沿着内壁管道进行攀爬作业。本文建立了GIS巡检机器人沿管道内部的底端、顶端、左右壁面、一般壁面进行攀爬的受力分析平衡模型,并基于该模型对机器人的沿内壁攀爬特性进行了理论分析,得到了作业环境参数、机器人机械结构参数和电气控制参数三者之间耦合关系模型,基于此为GIS巡检机器人的系统优化设计奠定了理论基础。(剩余8116字)