基于MPC分层控制的自适应巡航策略

打开文本图片集
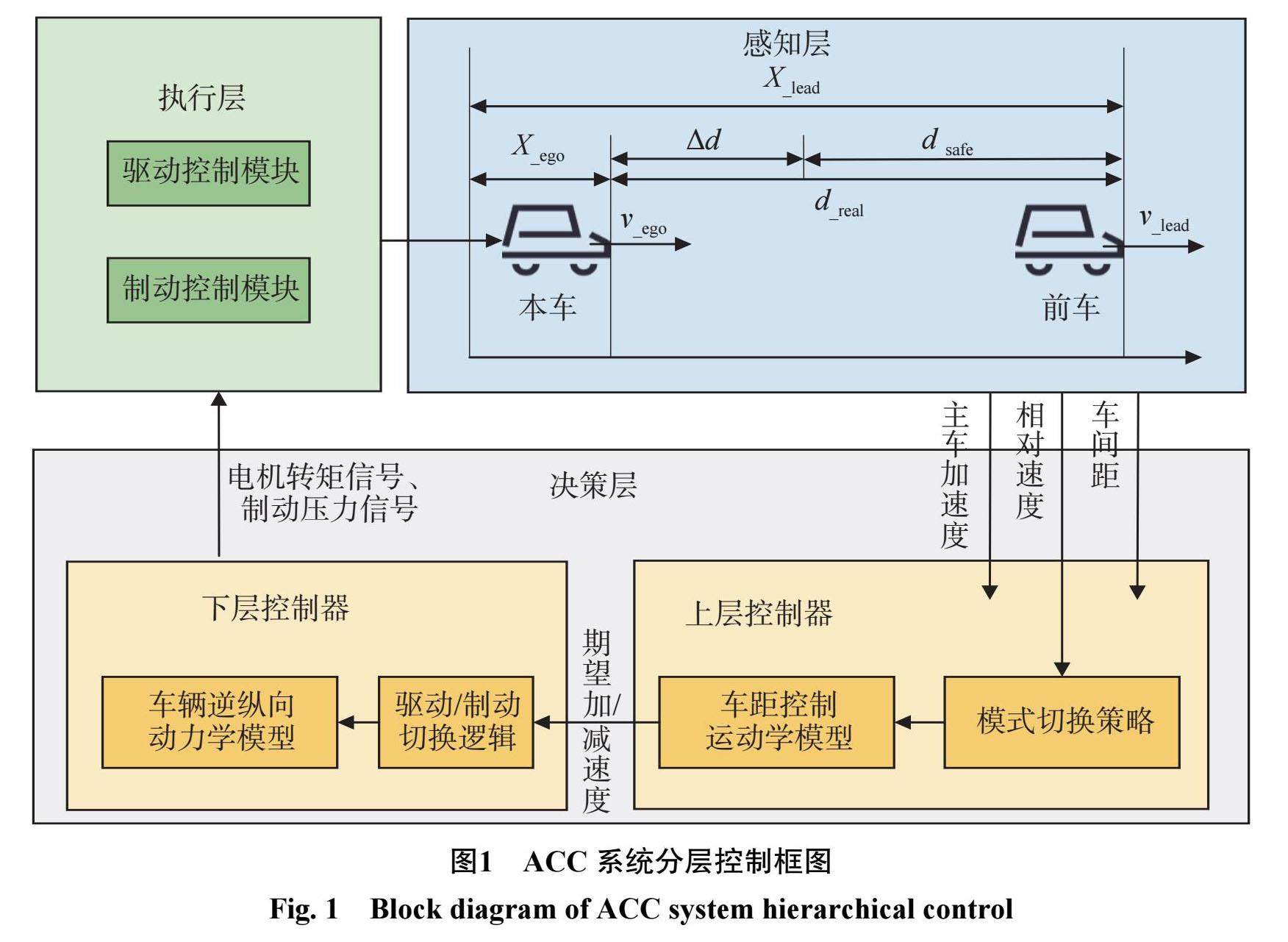
摘要:为减少车辆追尾等交通事故的发生,同时提升跟车稳定性、经济性和乘坐舒适性,提出1种车辆自适应巡航分层控制(adaptive cruise control,ACC)策略。上层控制器基于模型预测控制(model predictive control,MPC)计算车辆输出期望加速度,并根据行车工况切换进行速度与间距控制;下层控制器基于建立的纯电动汽车逆纵向动力学模型、驱动电机和制动模型优化驱动/制动切换策略,并通过上层输出的期望加速度计算得到期望电机转矩或期望制动管路压力,控制车辆的加速度和速度,达到速度控制或间距控制的目的。(剩余16538字)
