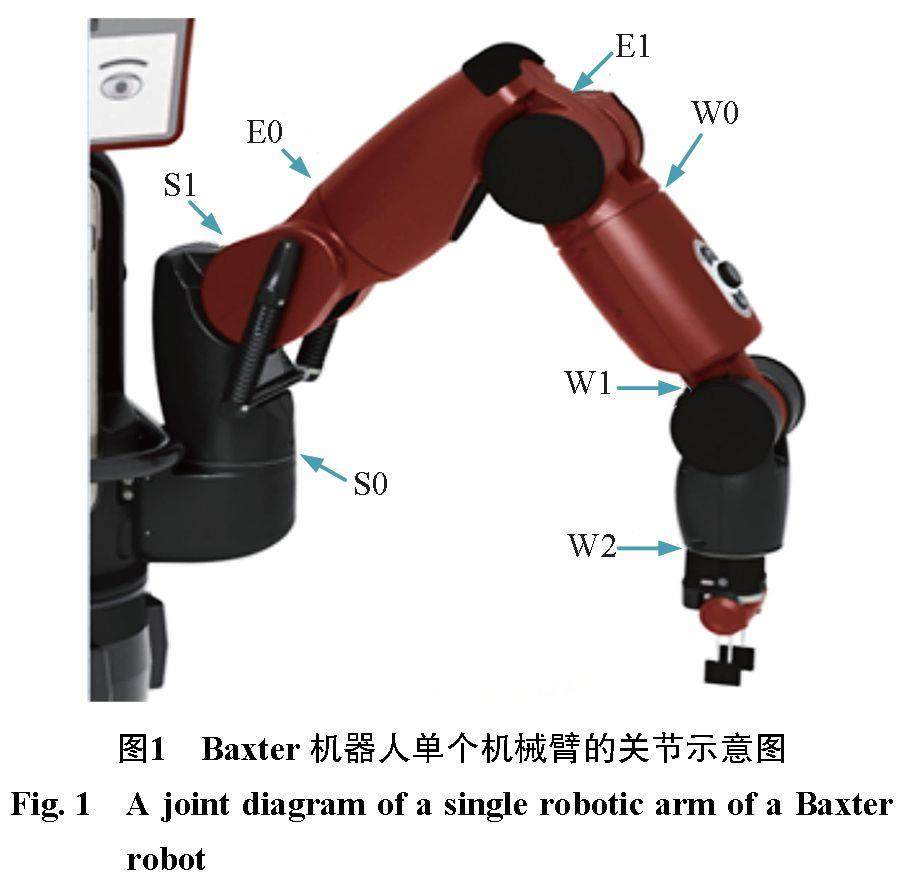
基于残差BP神经网络的Baxter机器人逆运动学分析方法

打开文本图片集
摘要:提出1种基于残差BP(back propagation)神经网络的自适应逆运动学分析方法,围绕数据采集至实时控制的整个运动规划流程,采集140组位置和欧拉角数据,利用残差BP神经网络对Baxter机械臂进行逆运动学分析,拟合得到机械臂7个关节角度;将训练好的关节角度以话题的形式发布,通过在抓取物体的脚本中订阅该话题实现通讯;结合Rviz进行可视化展示和实物双臂协同实验,对4种物体模型分别用残差BP神经网络和普通BP神经网络进行抓取实验,验证所提方法的有效性。(剩余10269字)
