融合语义路标的煤矿井下多传感器建图与定位方法

打开文本图片集
中图分类号:TD67 文献标志码:A
Multi-sensor mapping and localization method in underground coal mines based on semantic landmarks
LI Xiaobo1,2,YANG Fenghaol2,GAO Mingyang1,2,HUANGChangxin12,LIU Kui1.2 (1.State KeyLaboratoryofCoal Mine Disaster Preventionand Control, Chongqing 40o037,China; 2.CCTEG Chongqing Research Institute, Chongqing 400039, China)
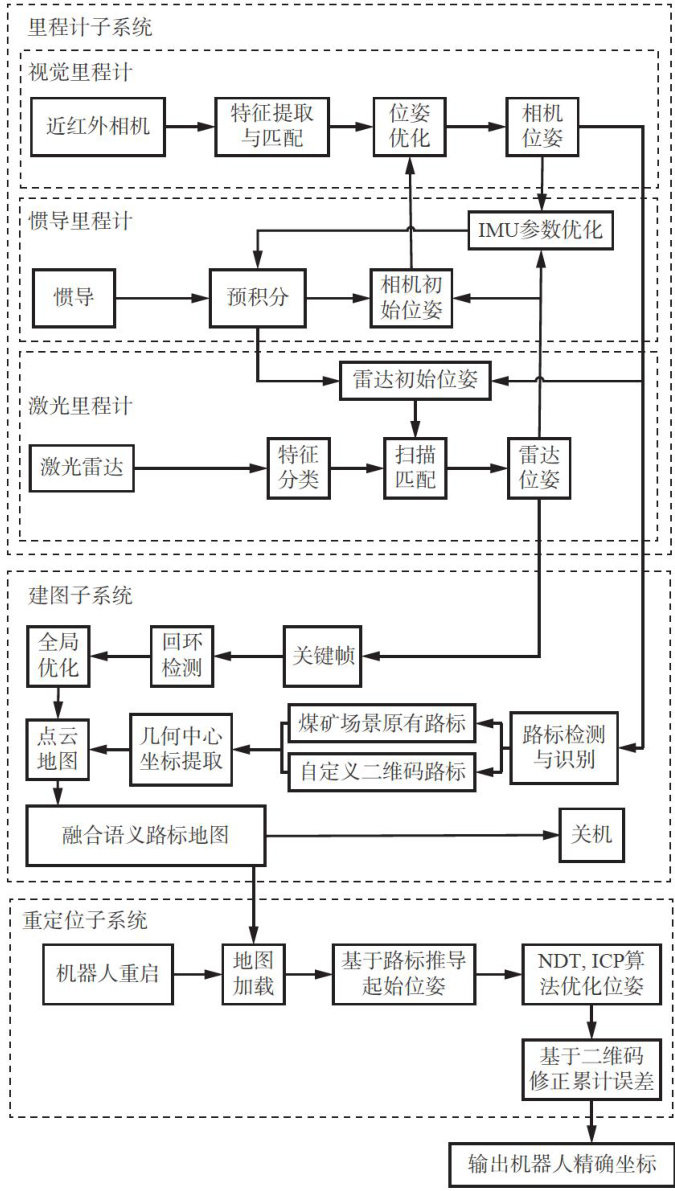
Abstract: Simultaneous Localization and Mapping (SLAM) is a key technology for achieving autonomous navigation of mining robots.However,due to sparseand highly repetitive environmental features in underground coal mines,significant cumulative localization erorsand prolonged relocalization times occur.To address this problem,amulti-sensor mapping and localization method for underground coal mines based on semantic landmarks was proposed.The method integrated observation information from visual odometry,inertial odometry, andLiDAR odometry to construct a tightly coupled multi-sensor fusion odometry system,thereby improving localization robustness in feature-deficient environments.Semantic landmarkssuitable forunderground environments were defined.By establishing a mapping relationship between roadway structural features and landmark encoding information,a fused semantic landmark map containing spatial geometric features and customized semantic labels was constructed to solve low relocalization eficiency and feature mismatches caused bythe high repetitiveness of roadway features.Semantic landmarks wereused to correct cumulative odometry errors in real time to achieve dynamic pose correction of the robot.Experiments were conducted using a dust suppressionrobot platform insurface tunnelenvironments and inunderground industrial tests.Theresults showed that the average mapping error in the ground tunnel was 0.020m , the maximum static localization error was (204号 0.035m , the maximum absolute pose error in dynamic localization was 0.153m ,and the average relocalization time was 3.3s . In underground roadways, a global map covering 2400m was constructed, with an average error of 0.038m per 100m ,and autonomous navigation of the robot was achieved.
Key words: mining robots; autonomous robot navigation; simultaneous localization and mapping; semantic landmarks; relocalization
0引言
近年来矿用机器人应用激增,其自主导航能力成为矿井智能化的核心瓶颈[1-2]。(剩余14921字)