基于ANSYS的改进型NGWN(I)行星轮系的仿真研究

打开文本图片集
摘 要:针对传统NGWN(I)行星轮系的双联齿行星齿轮在运行过程中出现的径向载荷不均与存在倾覆力矩问题,提出了一种改进型的行星轮系结构,采用SolidWorks分析软件建立行星轮系的装配模型,通过ANSYS分析工具进行了行星轮系齿轮的静态接触应力与静态弯曲应力的仿真计算,并将仿真计算结果与理论校核结果进行了对比.结果表明,利用CAD/CAE分析工具的计算结果与传统校核计算的结果相接近,验证了改进型行星轮系仿真分析的正确性,为改进型行星轮系的优化设计和可靠性设计提供了相关参考依据.此对均载、大传动比与小体积的行星齿轮减速器的设计及仿真研究具有一定的工程参考价值.
关键词:NGWN行星齿轮;有限元分析;齿轮强度;接触应力
中图分类号:TH132.425
文献标识码:A
0 引 言
NGWN行星轮系因具有结构紧凑、承载力强与传动比范围大等特点,而在航空航天、机械装备、机器人和微型传动等相关领域得到广泛应用[1-4].目前,科研人员针对NGWN行星轮系的研究主要集中在轮系传动比、传动效率及传递功率等方面[5-9].其中,饶振刚等[6]对NGWN行星齿轮减速器的配齿方案、轮齿间受力情况以及轮系传动效率进行了计算;杨小安等[9]分析了NGWN行星齿轮减速器传动比、传动效率及传递功率的影响因素.但受齿轮材料、制造加工工艺及装配水平等因素的限制,目前国产NGWN行星齿轮减速器还处于研制阶段,针对其轮系设计原理与结构优化方面的研究较少.基于此,本研究针对传统NGWN(I)行星轮系的双联齿行星齿轮在运行过程中出现的径向载荷不均与存在倾覆力矩的问题,提出了一种改进型NGWN(I)行星轮系结构方案,并采用三维建模软件工具建立该行星轮系的装配模型,通过ANSYS分析工具对行星轮系齿轮的静态接触应力与静态弯曲应力进行了仿真计算,并将计算结果与理论校核结果进行了对比,拟为改进型NGWN(I)行星齿轮减速器的优化设计和可靠性设计提供相关的参考依据.
1 NGWN(I)行星轮系及改进型模型
1.1 NGWN(I)行星轮系传动原理及结构改进
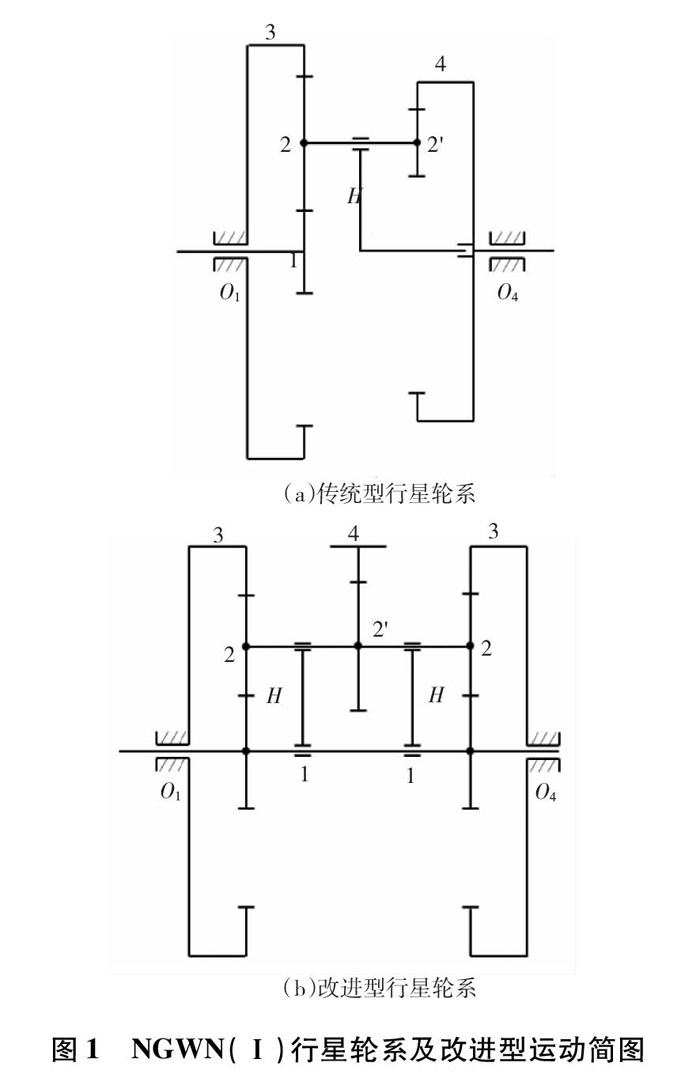
NGWN(I)行星轮系是一种通过太阳轮1与行星轮2、行星轮2与固定内齿圈3以及行星轮2’与输出内齿圈4之间的相互啮合,从而实现将动力由主动轴O1传输到从动轴O2的复合轮系机构,其运动简图如图1(a)所示.由图1(a)可知,由于NGWN(I)行星轮系采用双齿圈—行星轮进行传动,其在运动过程中,双联齿2-2’会存在径向载荷不均的情况.同时,太阳轮1悬臂布置的方式也会导致双联齿2-2’产生倾覆力矩,必然会对轮系的传动精度产生较大影响.基于此,本研究针对传统NGWN(I)行星轮系存在的上述不足进行了改进设计,具体思路是:将双联齿2-2’改为三联齿2-2’-2,将太阳轮1由悬臂布置改为对称布置,使三联齿两端齿轮分别与2个太阳轮及固定内齿圈啮合,从而实现了行星齿轮的均载及消除倾覆力矩的目的.改进后的NGWN(I)行星轮系运动简图如图1 (b)所示.
1.2 改进型NGWN(I)行星轮系三维模型建立
本研究的改进型NGWN(I)行星轮系由三联齿2-2’-2及太阳轮1-1和内齿圈3与4组成.其中,内齿圈3固定,中心轮1-1分别与三联齿2-2’-2两端齿轮啮合,三联齿2-2’-2的中间齿2’与内齿圈4啮合,行星架H浮动支撑三联齿,功率由太阳轮1-1输入,从内齿圈4输出.改进型行星轮系各齿轮相关指标与参数如表1所示.
按照改进思路,本研究在SolidWorks分析软件中建立了相关零件的三维仿真模型,然后进行装配,最终形成的改进型NGWN(I)行星轮系装配体如图2所示.
通常,传统NGWN(I)行星轮系中的双联齿采用一体化设计,但在实际生产加工过程中,三联齿的一体化结构会造成各齿加工时磨齿过程困难,导致三联齿整体的加工工艺性较差、精度较低.对此,为了改善三联齿的加工性能,根据表1中相关指标与参数,本研究将三联齿采用分体设计,将其拆分为2个齿轮及一个齿轮轴,该结构可以有效减小整体三联齿加工时的退刀间隙,使得其轴向结构更加紧凑.
1.3 改进型NGWN(I)行星轮系有限元模型建立
本研究拟在SolidWorks分析软件中对完成的轮系装配模型进行简化,去掉对强度分析没有影响的轴承套筒等零部件,并将简化模型导入改进型NGWN(I)行星轮系的ANSYS仿真分析工具中,建立行星轮系的有限元模型.最终获得行星轮系模型及其有限元模型如图3所示.
从齿轮啮合的几何模型来看,本行星轮系装配体中的齿轮在啮合处仍保持SolidWorks分析软件中所建立的齿轮副啮合状态,而没有出现几何模型相互重叠现象.据此可认为,该模型可作为建立齿轮有限元模型的几何模型.
2 轮系传动系统受力分析及强度校核
2.1 齿轮受力分析
由于本研究的改进型NGWN(I)行星轮系中采用的齿轮均为圆柱直齿轮,因此在其啮合过程中齿轮主要受切向力Ft与径向力Fr的作用,其齿轮受力简图如图4所示.
在具体的应用中,本研究的改进型行星轮系主要应用于某机构中作为传动受力结构,通过提取其关键工况载荷,得到该轮系中T4载荷为3 133 N·m.
根据图4,不同齿轮的转矩传递公式及转矩转切向力与径向力公式为,
T1=T4i14×η14(1)
Ft=T×2 000d(2)
Fr=Fttana(3)
式中,i14为传动比,η14为传动效率,d为齿轮节圆直径,α为齿轮法面压力角。(剩余6461字)
