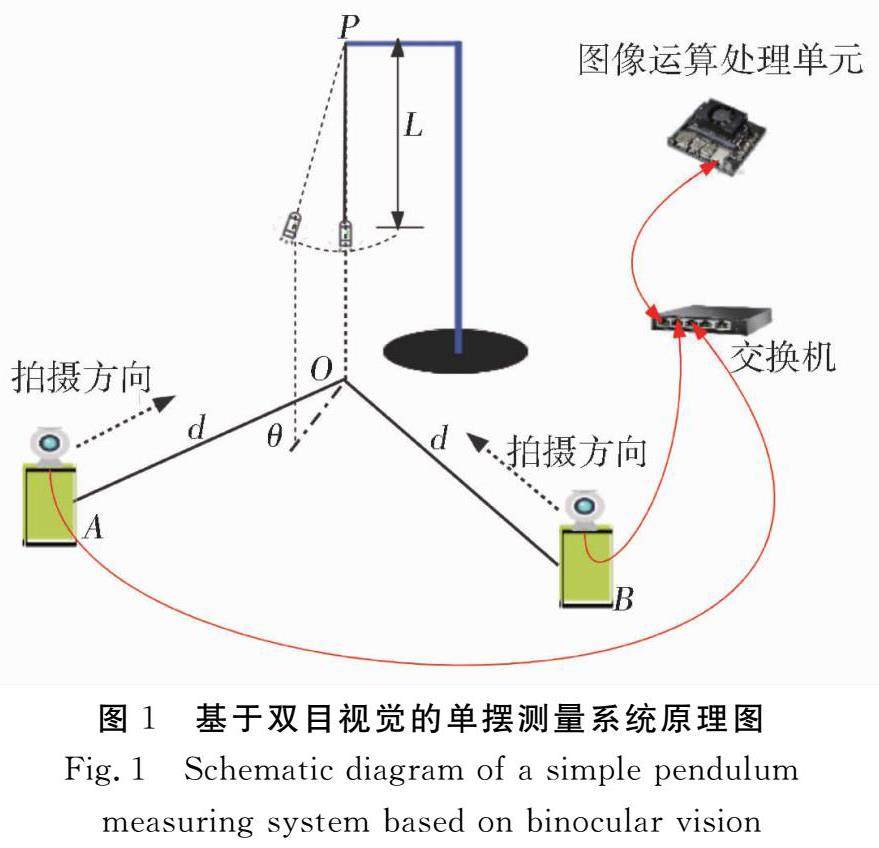
基于双目视觉的单摆测量系统设计

打开文本图片集
基金项目:
2020年度安徽高校自然科学研究项目(KJ2020A0927);芜湖职业技术学院校级科研团队(wzykjtd202004)
作者简介:
胡飞(1988-),男,安徽六安人,芜湖职业技术学院信息与人工智能学院讲师,硕士,研究方向:嵌入式技术与物联网技术应用。E-mail:hufei@whit.edu.cn
摘 要:为实现无接触测量单摆系统的摆长与空间位置,采用基于局域网通信的网络摄像机,构建双目视觉测量系统,两台摄像机垂直放置并仅能拍摄到单摆物体末端的运动区域,Jetson Nano通过交换机获取两台摄像机拍摄后回传的图像,根据场景可选择基于HSV颜色空间方法或基于深度学习框架的YOLOv5方法,实现在动态图像中对单摆物体的跟踪并实时标记,并通过帧间的时间差与单摆物体的像素位置,计算单摆的摆长与空间位置。(剩余7374字)
